In our documentation, we use the (FFT) noise density parameter for the gyroscope and the accelerometer signals. The manufacturers might use other noise characteristics in their datasheets: angle/velocity random walk parameters, power spectral densities (PSD), or standard deviation at a certain bandwidth (sampling rate). All the mentioned parameters contain the same information and here we present the relationship between these quantities (for reference see IEEE Std. 952-1997 C.1.1).
Relationship between the noise characteristics
Gyroscope Noise Density:
Gyroscope noise density characterizes the random fluctuations in the gyroscope's output per square root of frequency bandwidth. (Unit: angular rate per square root of hertz, typically degrees per second per square root hertz or radians per hour per square root hertz.)
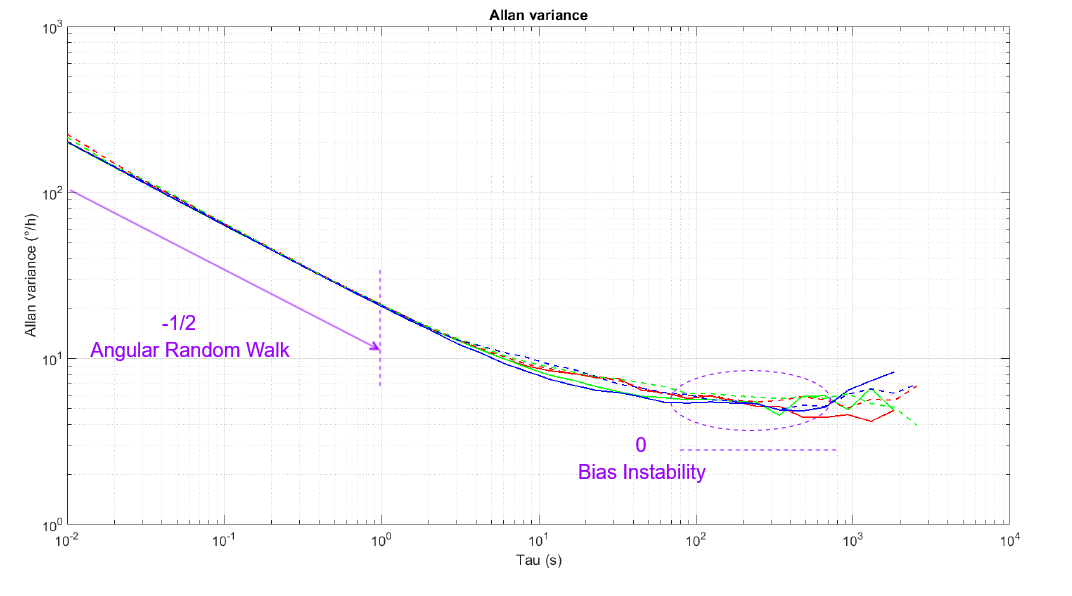
Noise density  is usually determined using the log-log Allan deviation plot reading the value of the
is usually determined using the log-log Allan deviation plot reading the value of the  slope at the cluster time
slope at the cluster time 
Angle Random Walk (ARW):
ARW quantifies the rate at which the angle uncertainty grows over time due to sensor noise. It is a crucial metric in determining the long-term stability and accuracy of gyroscopes. (Unit: angle per square root of time, typically degrees per square root hour or radians per square root hour.)
Angle random walk parameter:  relates to the noise density as follows:
relates to the noise density as follows:

Power Spectral Density (PSD):
Power Spectral Density describes how the noise present in the sensor’s output signal varies with angular frequency.
Power spectral density:  relates to the noise density as follows:
relates to the noise density as follows:

Noise Standard Deviation:
Noise Standard Deviation represents the average magnitude of deviations of individual noise samples from the mean noise value at a certain bandwidth.
Noise standard deviation at bandwidth:  relates to the noise density as follows:
relates to the noise density as follows:

With other unit conversions it is important to remember the following relations:



The relationships between the accelerometer noise characteristics are similar: accelerometer noise density  , velocity random walk parameter
, velocity random walk parameter  , power spectral density
, power spectral density  , and noise standard deviation at a certain bandwidth
, and noise standard deviation at a certain bandwidth  .
.
Examples:
- Converting Gyroscope Noise Density to Angle Random Walk:
Gyroscope Noise Density (ND) is typically given in units of (°/s/√Hz) or (°/h/√Hz), and we want to convert it to ARW (°/√s or °/√h).
Given:

To convert to ARW, we need to remember that Hertz (Hz) is the inverse of seconds (s).


 ………………. i.e. Angle Random Walk
………………. i.e. Angle Random Walk
Now, to convert it to °/√h we need to remember that 1 h = 3600 s. Hence, 1 s = 1/3600 h.
Thus,

This conversion shows the direct relationship between gyroscope noise density and Angle Random Walk, highlighting their interchangeability in sensor specifications.
- Converting Accelerometer Noise Density to Velocity Random Walk:
Accelerometer Noise Density (ND) is typically given in units of (m/s2/√Hz), and we want to convert it to VRW (m/s/√s).
Given:

To convert to VRW, as discussed above we need to remember that Hertz (Hz) is the inverse of seconds (s).



 ………………. i.e. Velocity Random Walk
………………. i.e. Velocity Random Walk
Now, to convert it to m/s/√h we need to remember that 1 h = 3600 s. Hence, 1 s = 1/3600 h.
Thus,

This conversion shows the direct relationship between accelerometer noise density and Velocity Random Walk, highlighting their interchangeability in sensor specifications.
Note: Units used for accelerometers can switch between the SI m/s² and the more commonly used milli-g (mg) or micro-g (µg) just like you can see in our documentation. So, it is important to understand the following conversion:



1mg ≈ 9.81*0.001 ≈ 0.01 m/s², 1µg ≈ 9.81*0.001 ≈ 0.01 m/s²
Thus, a noise density of 1 mg/√Hz is approximately equal to a VRW of 0.01 m/s/√s