IMU Errors Analysis(IMU 误差分析)
Overview
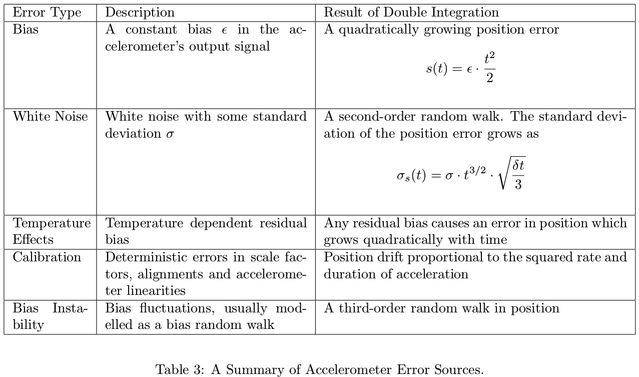
- 确定性误差(六面法 标定)
- 开机后恒定的零偏误差(bias)
- 比例因子误差(scale factor)
- 轴偏及非正交误差(misalignment errors and non-orthogonality)
- 非线性误差(non-linearity)
- 温度误差(thermal noise)
- 陀螺仪还包含加速度的变化引起的误差(g-dependent noise)
- 随机性误差(Allan方差 标定)
- 高斯白噪声(Noise Density)
- 零偏不稳定性(Bias Instability or Random Walk)

IMU Stochastic Errors
- a high frequency additive White Noise
- a slower varying sensor Bias
continuous-time model:
Ref:
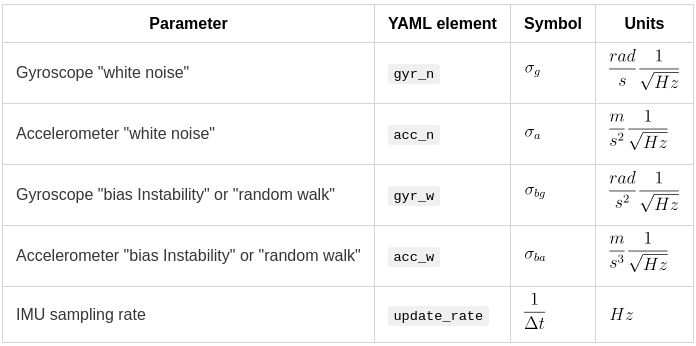
How To Get
the Datasheet of the IMU
- White Noise Terms
- Rate Noise Density (Angular Random Walk - ARW)
- Acceleration Noise Density (Velocity Random Walk - VRW)
- Bias Terms
- In-Run Bias (Bias Stability)
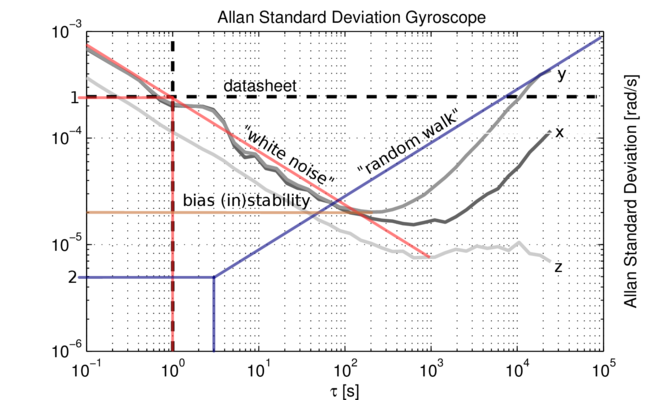
the Allan standard deviation (AD)
- "white noise" is at tau=1 (slope -1/2 in a log-log AD plot)
- "random walk" is at tau=3 (slope +1/2 in a log-log AD plot)
Noise Samples (Continuous-time)
MPU6000 / MPU6050
1
2
core_noise_acc: 0.003924 # [m/s^2/sqrt(Hz)] mpu6000 datasheet
core_noise_gyr: 0.00008726 # [rad/s/sqrt(Hz)] mpu6000 datasheet
ADIS 16448
1 |
|
MYNT-EYE-S1030 IMU
1 |
|
Performance Analysis Software
- IMU-TK: Inertial Measurement Unit ToolKit
- gaowenliang/imu_utils: A ROS package tool to analyze the IMU performance
1
2
3
4
5
6
7
8
9
10
<?xml version="1.0"?>
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/camera/imu/data_raw"/>
<param name="imu_name" type="string" value= "ZR300"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/"/>
<param name="max_time_min" type="int" value= "80"/>
<param name="max_cluster" type="int" value= "100"/>
</node>
</launch>
- rpng/kalibr_allan: IMU Allan standard deviation charts for use with Kalibr and inertial kalman filters
- XinLiGH/GyroAllan: 陀螺仪随机误差的 Allan 方差分析
- AllanTools: A python library for calculating Allan deviation and related time & frequency statistics.
评论已关闭