Permanent Magnet DC Motor(直流电机数学模型)
Transfer function and state space model are developed for a permanentmagnet DC motor. This system is a combination of an LR circuit andmass with rotational friction.
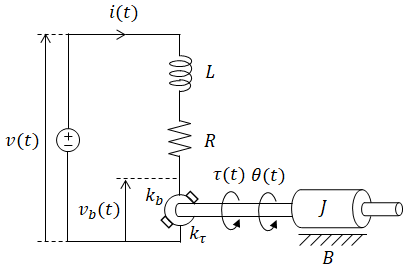
| (input) | v(t) | = | applied voltage (armature voltage) (V) | |
| i(t) | = | armature current (A) | unknowns | |
| vb(t) | = | back emf (V) | ||
| τ(t) | = | generated torque (Nm) | ||
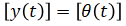
| (output) | θ(t) | = | rotor position (rad) | |
| L | = | armature inductance | ||
| R | = | armature resistance | ||
| J | = | load and armature inertia | ||
| B | = | motor friction coefficient (e.g. brushes) | ||
| kτ | = | motor torque constant (Nm/A) | ||
| kb | = | motor back emf constant (V*sec/rad) |
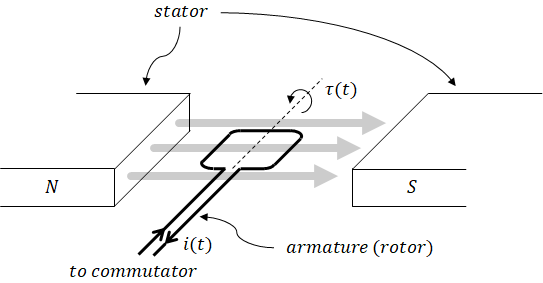
Permanent magnet produces constant flux so flux isincluded in the motor constants.
Differential Equation
4 unknowns so 4 equations are needed.
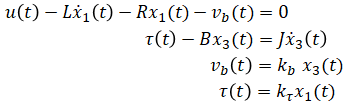
- Kirchoff's voltage law (eq. 1)

- Newton's 2nd law
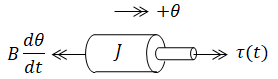 From this free body diagram: (eq. 2)
From this free body diagram: (eq. 2)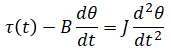
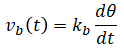
- Back emf (motion produces voltage that opposes current flow) (eq. 3)
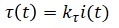
- Current produces torque (eq. 4)
Transfer Function
Laplace transform (eq. 1), (eq. 2), (eq. 3), (eq. 4):
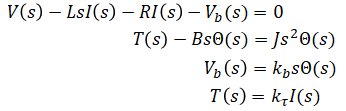
Solve for the 4 unknowns:
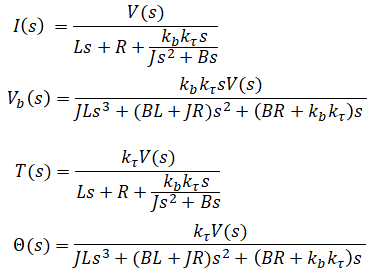
Solve for output/input:
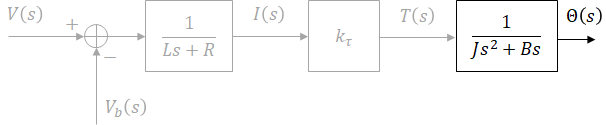
Block Diagram
Block diagram is drawn from input to output. Voltage creates current flow,current produces torque, and torque rotates the motor which dictates its position.Some techniques used below to create and manipulate block diagrams arecovered here.
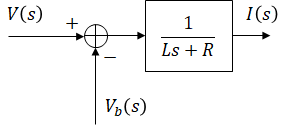
- Voltage to current
Rearrange Laplace transform of (eq. 1)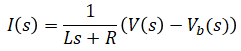
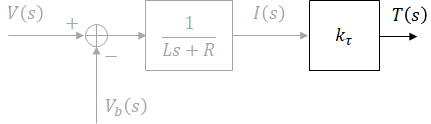
- Current to torque
Rearrange Laplace transform of (eq. 4)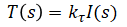
- Torque to position
Rearrange Laplace transform of (eq. 2)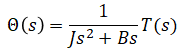
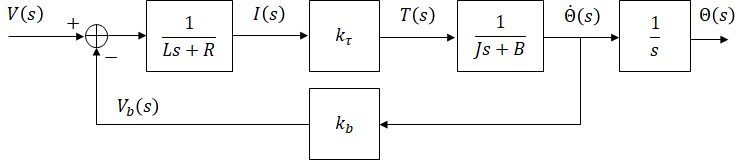
- Back emf
Transfer function from torque to position is separated to show angular velocity which affects back emf (eq. 3)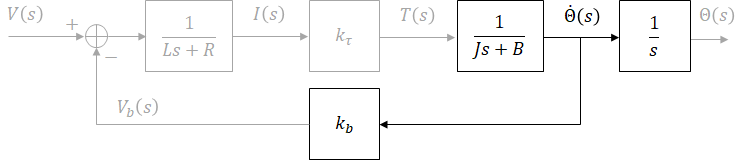
This is not the only block diagram that can be constructed for this systembut the blocks in this diagram closely represent physical parts of the system.
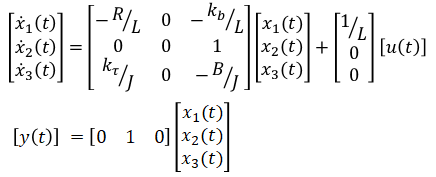
State Space Model
When an inductor is present in a system, current throughthe inductor is commonly chosen as a state variable. When a mass is present,its position and velocity are commonly chosen as state variables. These threevariables along with the input are enough to determine this system's behavior(future values of the output, which is the position of the motor in this system). For these reasons, current, rotor position, and rotor angular velocityare chosen as the state variables.
State vector:
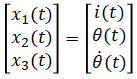
Input vector:

Output vector:
Rewrite (eq. 1), (eq. 2), (eq. 3), (eq. 4) in these new notations:
Rearrange equations to express ẋ(t) and y(t) interms of x(t) and u(t):
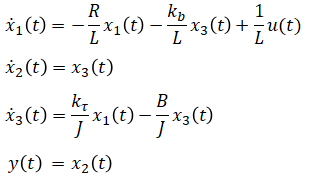
Rewrite in matrix format:
Approximation
The 3rd order system can be approximated as a 2nd order system asfollows[1][2]
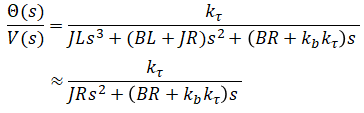
[1] Phillips, Parr (2011) Feedback Control Systems 5th Edition: inductance issmall enough to be ignored for servomotors
[2] Spong, Hutchinson, Vidyasagar (2006) Robot Modeling and Control: it isreasonable to assume L/R (electrical time constant) << J/B(mechanical time constant) for many electro-mechanical systems so let L/R be 0.
评论已关闭