怎样比较IMU
市场上的传感器将有包括以下全部或部分规格的数据表。如果数据表上有这些规格,了解它们的含义很重要,因为是根据这些规格选择IMU。
Full Scale
不建议选择小于预期运动的测量范围
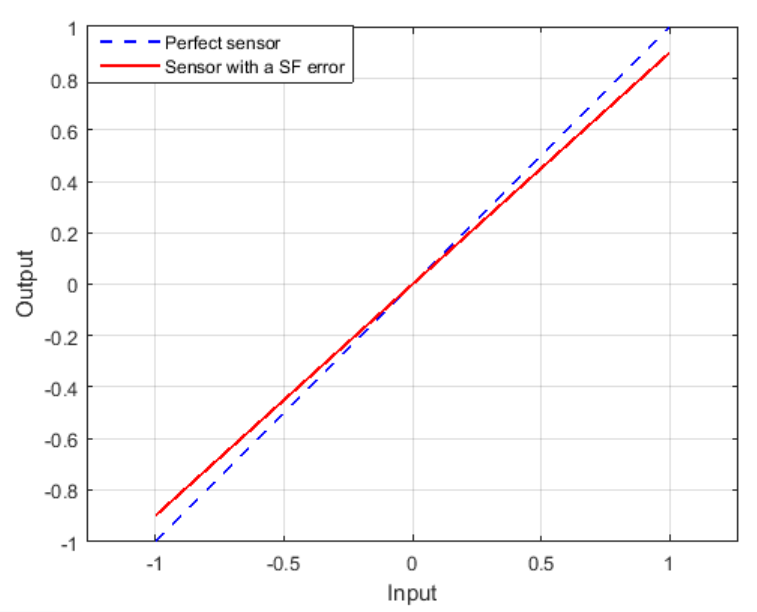
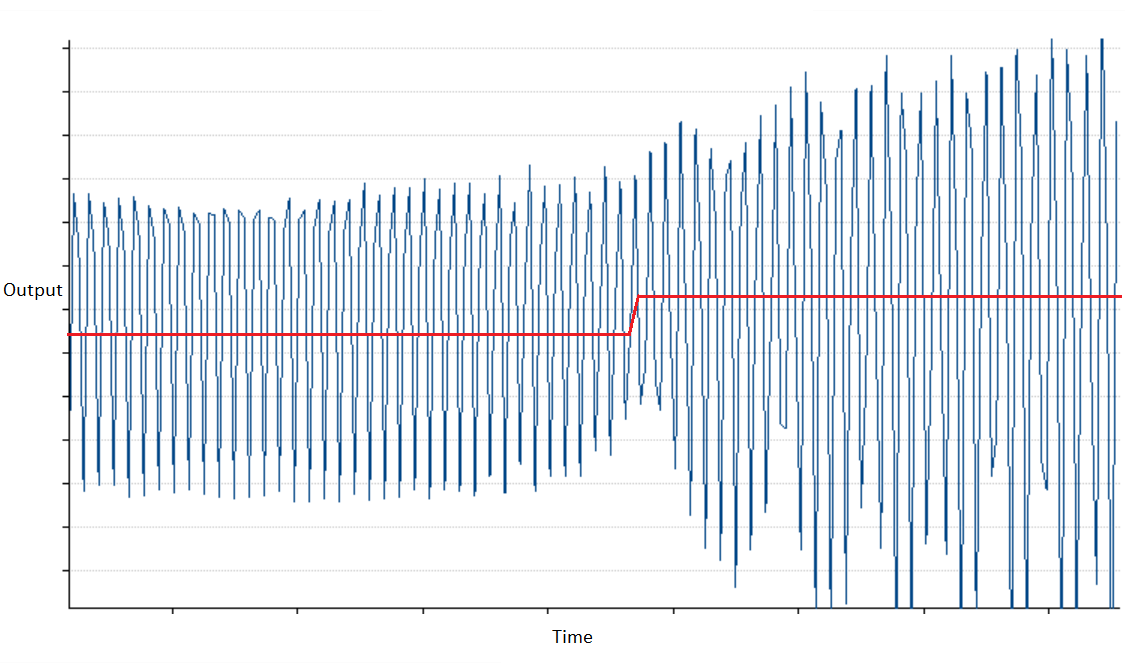
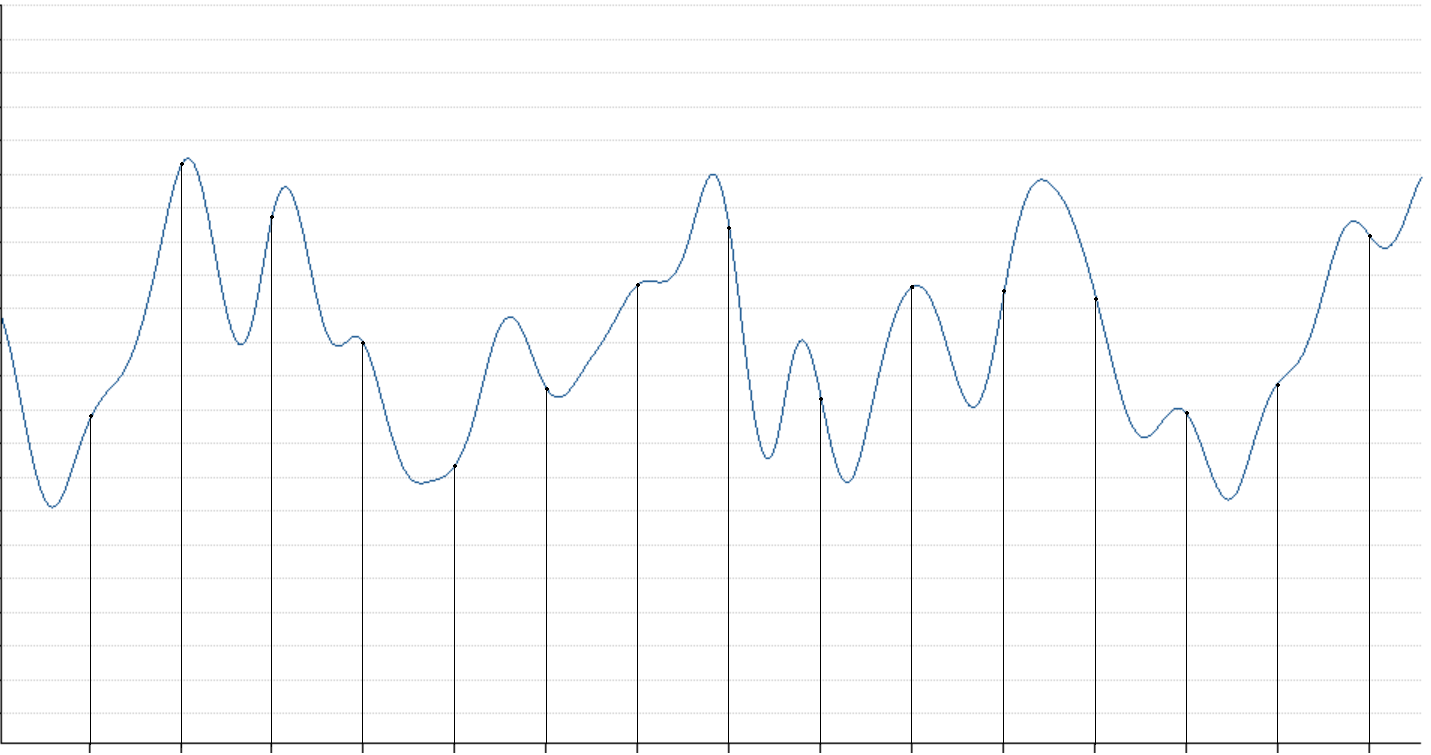
Scale Factor Stability
下图显示了一个理想的传感器(蓝色)将报告运动的实际输入,而一个现实的传感器(红色)将报告输出上的轻微偏移,与输入上的实际运动相比。
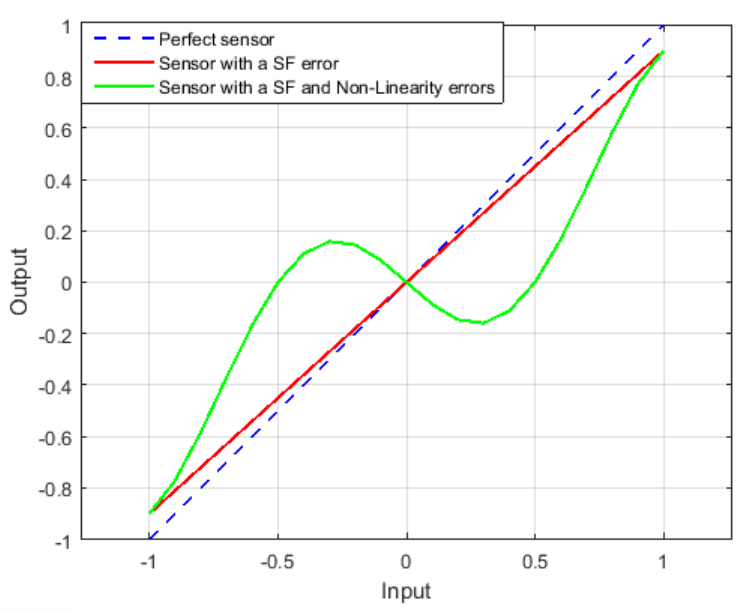
Non-linearity
非线性误差可以通过先进的校准程序最小化。
One Year Bias Stability
这个参数反映了传感器偏差的哪一部分不能校准,以及导航滤波器需要补偿多少。在每次启动时,INS都会经过一个预热过程来估计传感器偏差。这个值越低,INS就越容易估计和补偿偏置,从而缩短预热时间。
Velocity/Angular Random Walk
速度随机游走的常用单位(VRW):m/s/√hr或m/s/√s或g/√Hz
角度随机游走的常用单位(ARW): °/√hr或°/√s
这对于需要精确计算横滚和俯仰的角度应用尤其重要。
In Run Bias Instability
运行中偏置不稳定性是所有MEMS imu的一个神奇数字,总是以较低的值为目标。然而,这个值并不能提供有关实际传感器性能的很多见解。特别是因为:
该值通常在恒温下测量
偏置不稳定性从未与相关的时隙(tau)指定。如果在非常低的时隙(例如tau < 200s)获得偏置不稳定性,则该信息毫无意义,因为偏置将迅速发散。
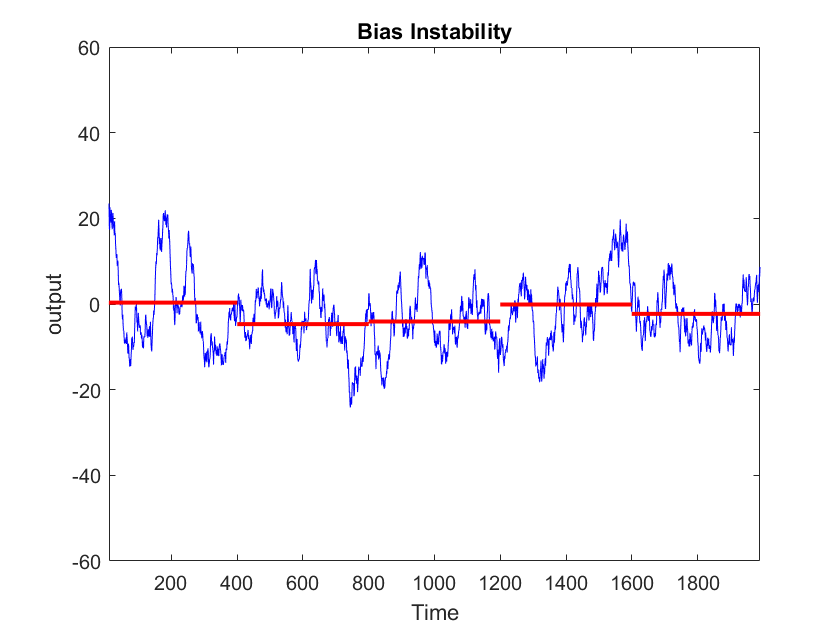
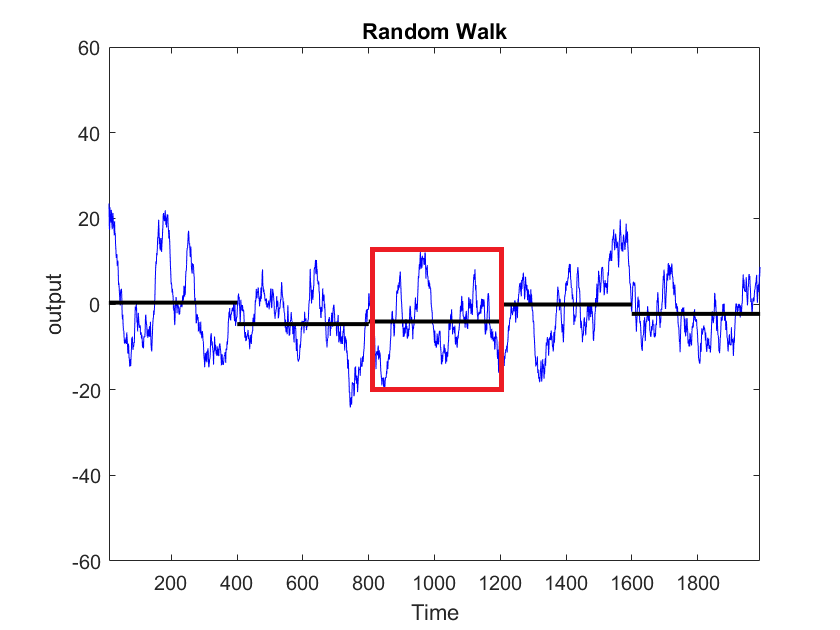
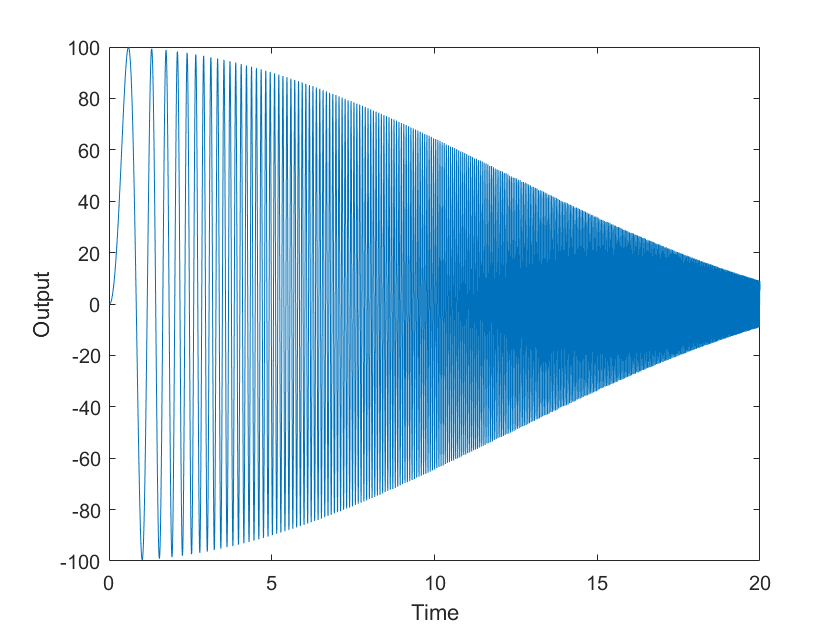
Allan variance
The Allan Variance is a complex diagram, showing for various time scales how good is the sensor.
Allan variance is typically measured at ambient and control temperature so user should still be careful when comparing Allan variances.
When the high frequency noise is "Gaussian", which is typically the case, one can measure the Angular/Velocity random walk at a time scale of 1second.
The Bias Instability is the bottom of the curve.
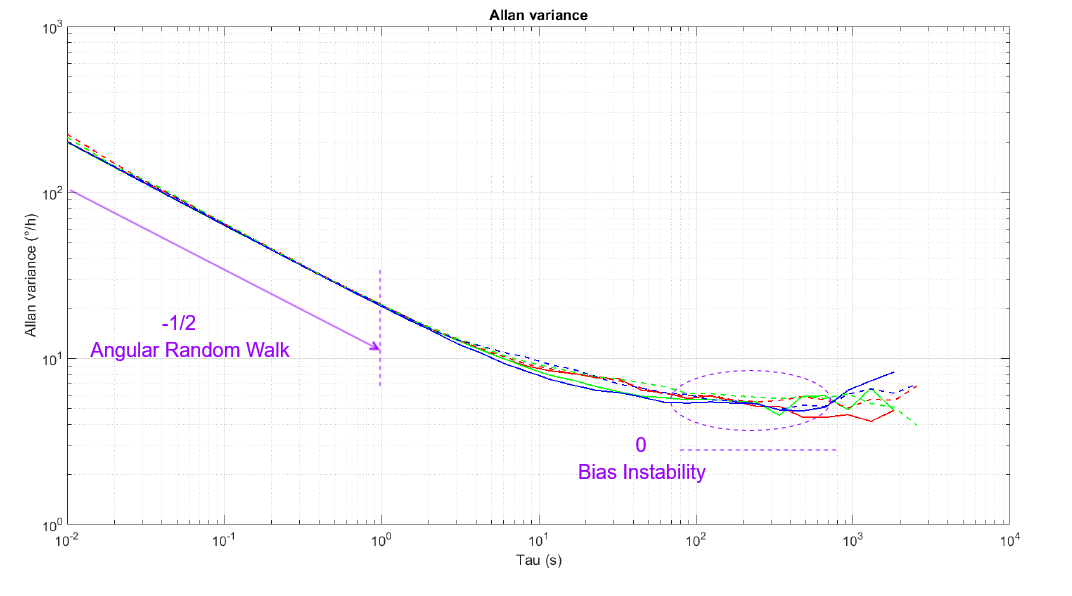
What is more important is how the sensor behave after reaching its bias instability. While the best MEMS sensors will tend to stabilize, lower grade sensors or uncalibrated sensors will quickly ramp up, showing a sensor bias drift.
Vibration Rectification Error
It is generally provided on highly qualified systems, while most IMUs just do not specify what happens in vibrations.
The Vibration Rectification Error gives the expected bias for a given level of vibrations on accelerometers or gyroscopes.
For instance if the VRE is 1 °/h/g² this means we can expect a maximum of 1°/h of bias for 1g of random vibrations.
Sampling Rate
The Sampling Rate is the frequency at which the measurements are taken on the sensor's input. The sampling rate divided by 2 is the Nyquist frequency, which gives the maximum observable frequency of a signal we are measuring.
This parameter matters if we wish to observe higher frequency motions, for instance to achieve vibration monitoring or fast motion compensation.
Bandwidth
The Bandwidth is maximum frequency you can take a reliable acceleration or angular velocity reading. This will directly represent which frequency of motion you will be able to measure, as any signal with a frequency higher than the bandwidth will be attenuated.
This point should be considered for any application that involves vibration or fast motion analysis.
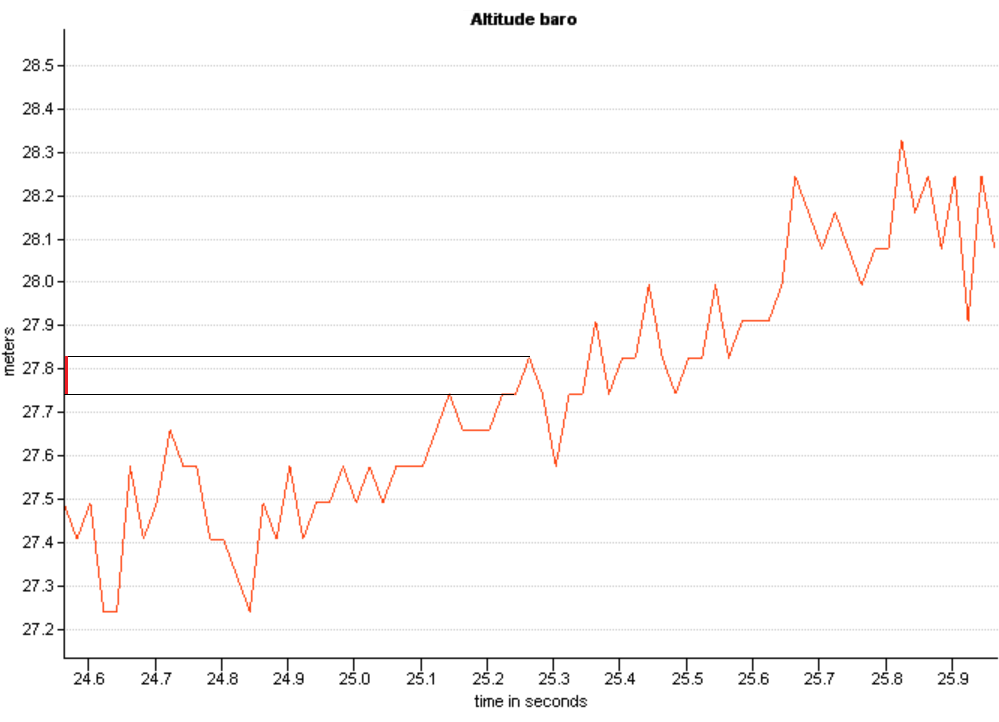
Resolution
The Resolution is the smallest increment measurable on a sensor.
This parameter is of less importance, as usually much lower than the noise of the sensor. The sensor angular or velocity random walk will be the actual decisive factor as this parameter gives the actual system noise level during 1 second averages.
Orthogonality
The Orthogonality represents the physical misalignment between the sensor of different axis.
Cross-Axis Sensitivity
This is the sensitivity of a sensor to a vibrations applied to a perpendicular axle. Ideally it should be minimal as each axle should be independent from each other.
Gyro-G
Gyroscopes can have a bias when under acceleration, this error is called gyro-g effect. This is typically estimated and compensated during calibrations.
评论已关闭