直接法激光雷达里程计(DLO)阅读笔记
一、算法结构

LO整体框架:
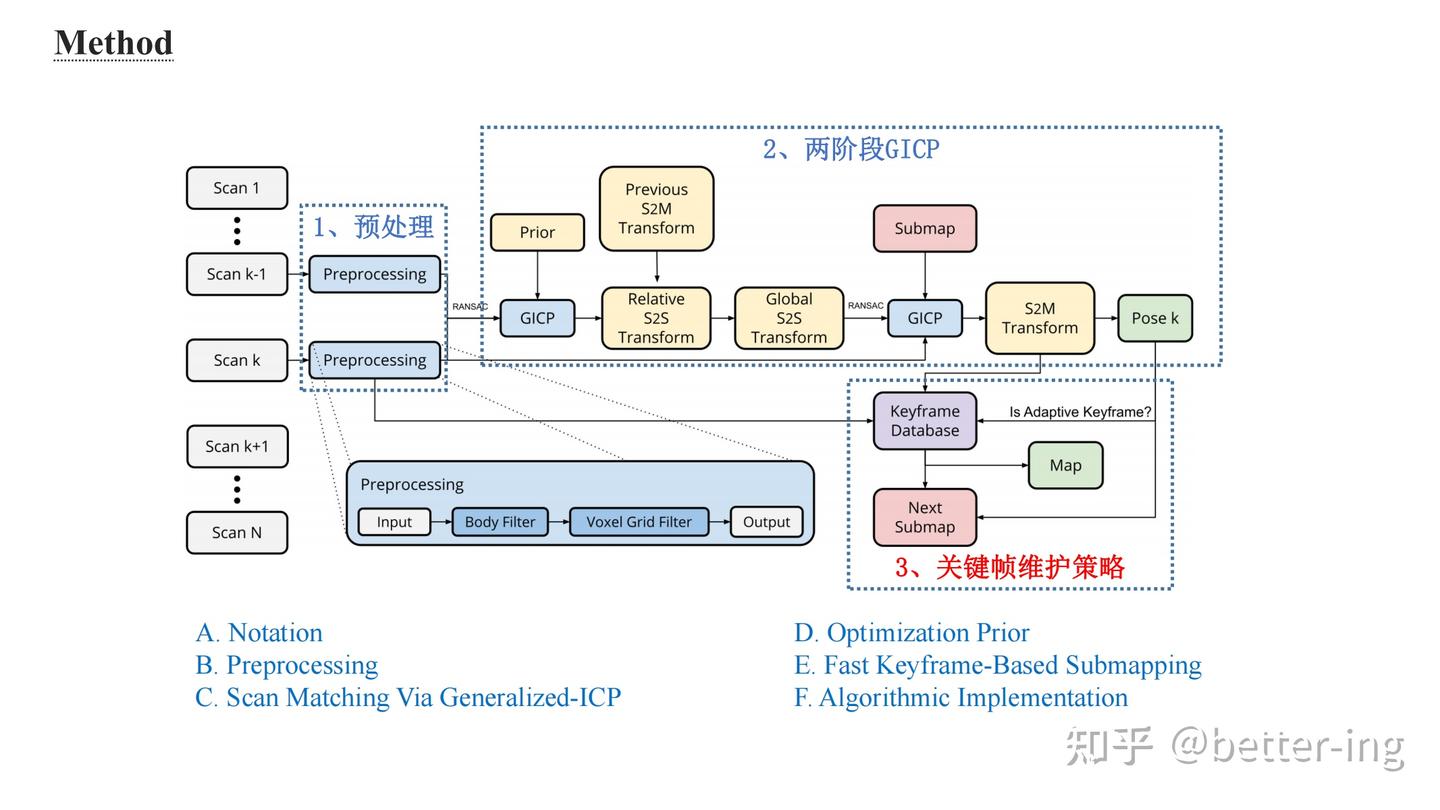
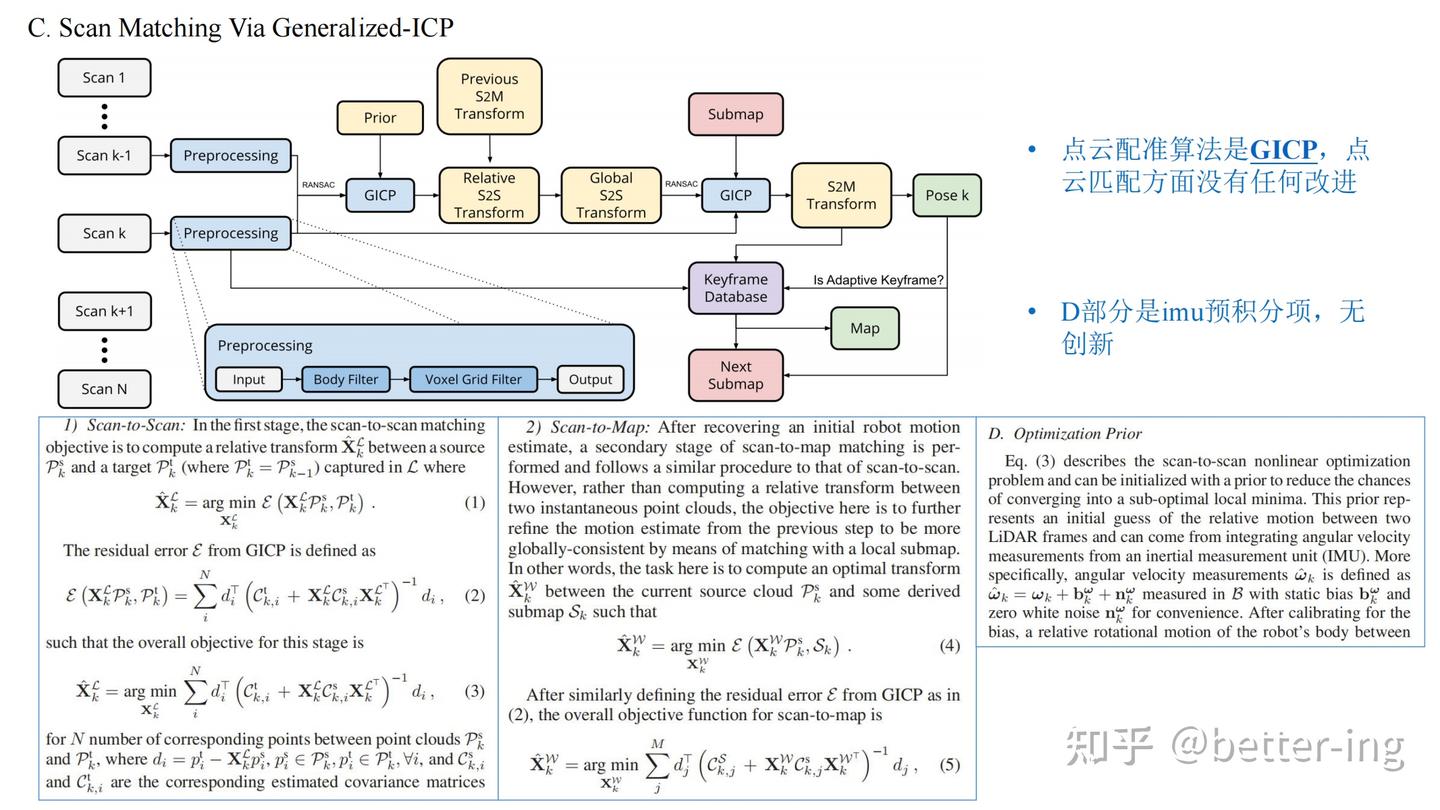
两阶段GICP:
- scan-to-scan的粗配准;
- scan-to-map的精配准;
- GICP并不是这篇文章的创新点,整个框架以及submap的维护和组织才是论文的创新点。
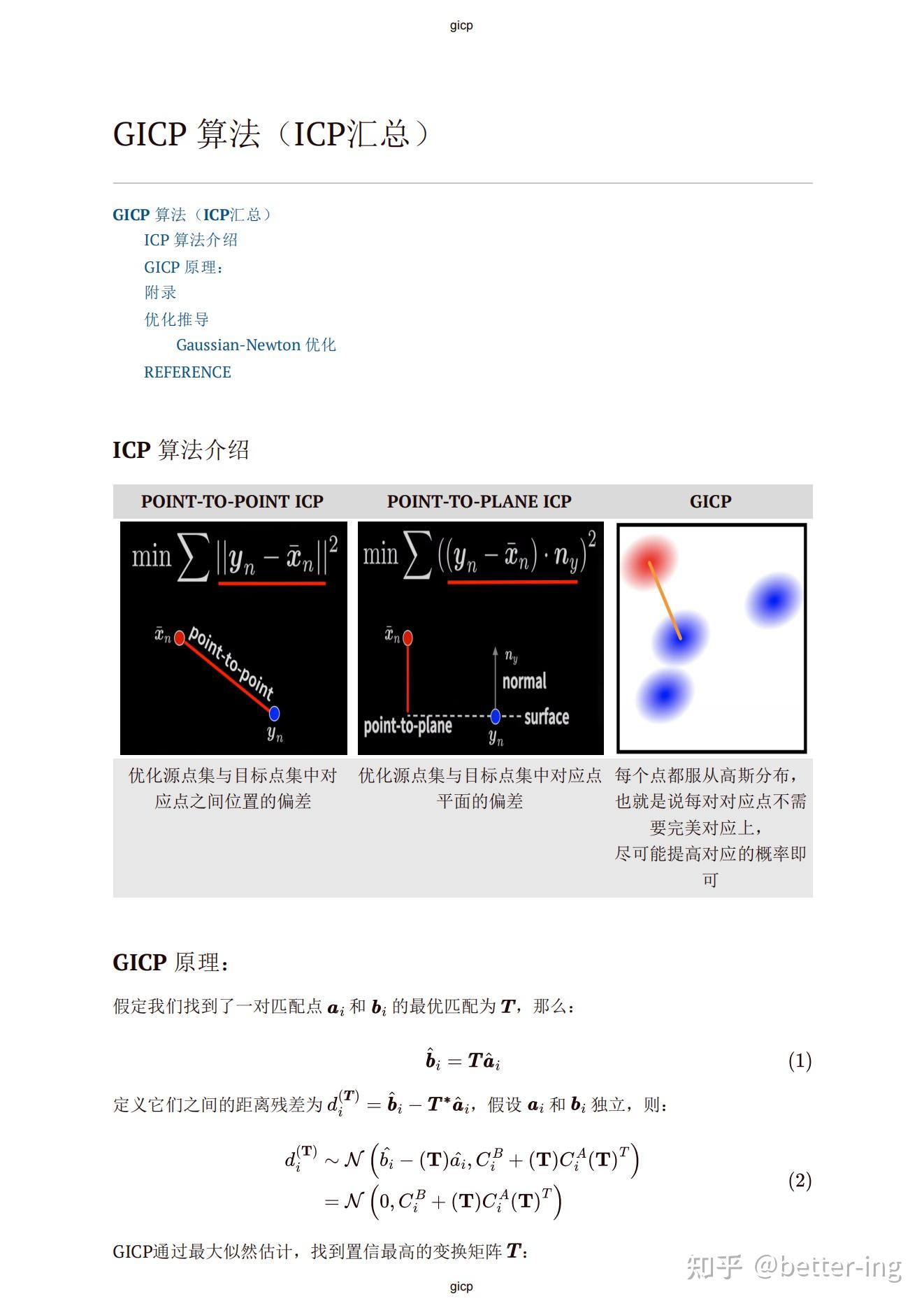
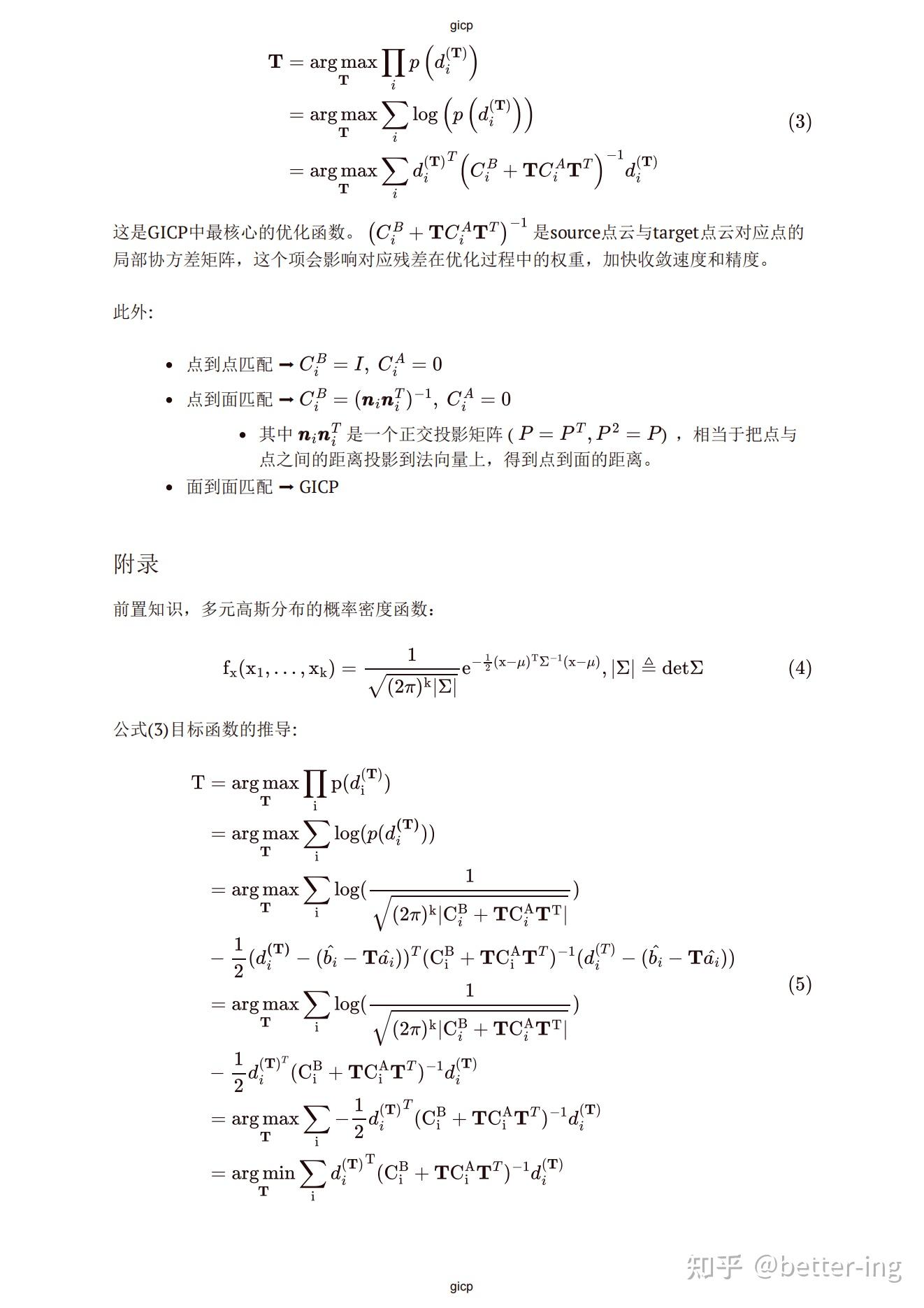
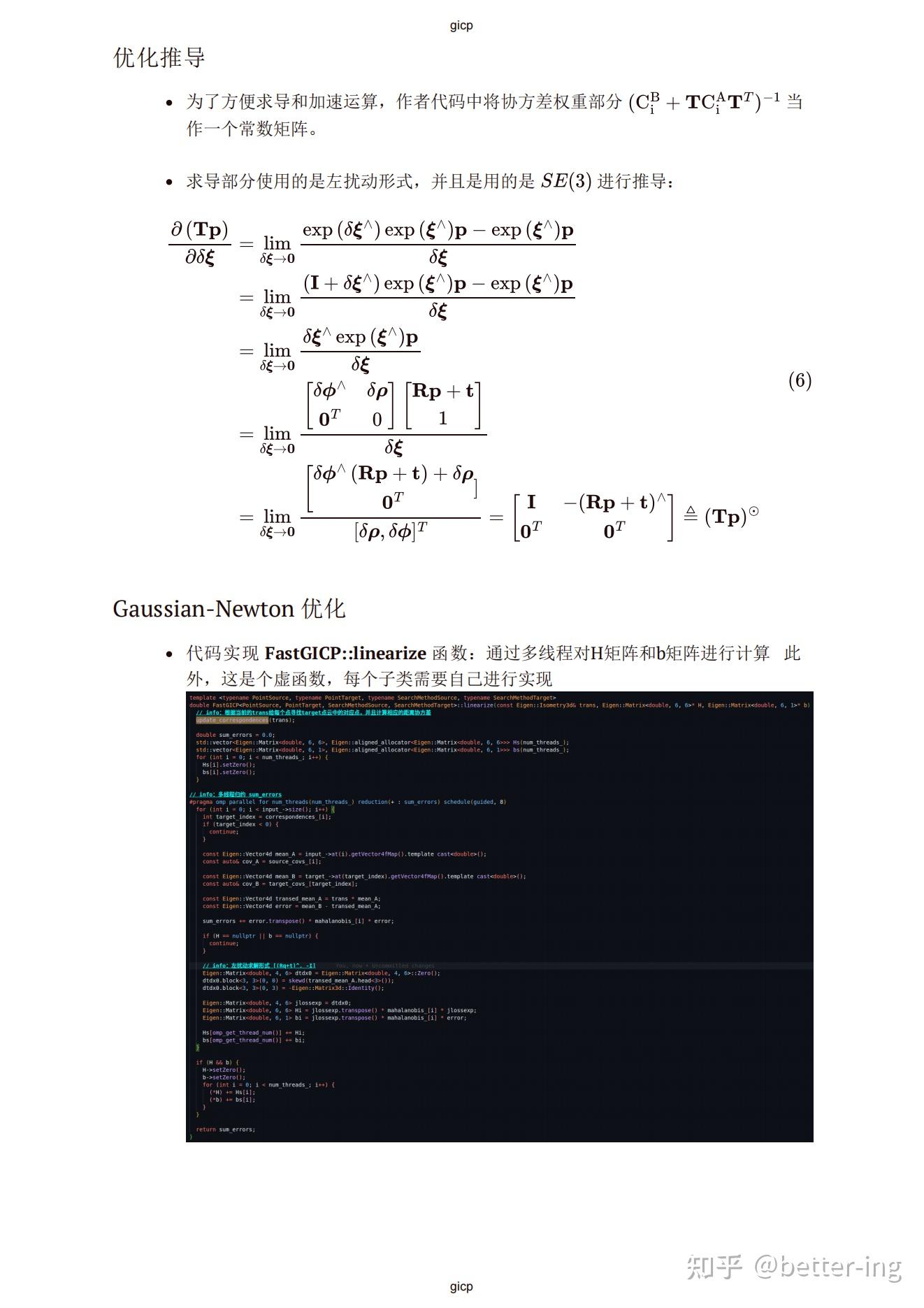
GICP算法介绍:
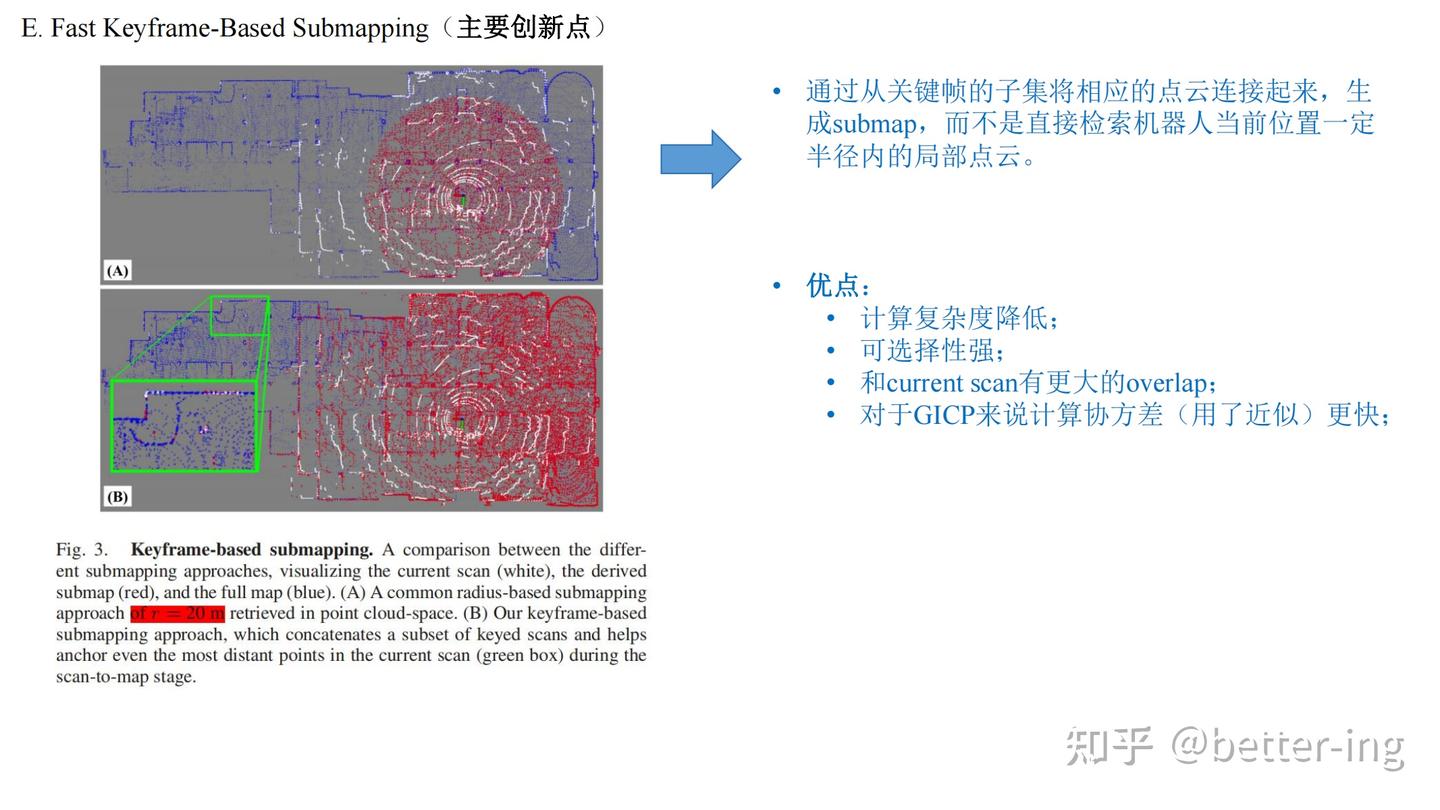
基于关键帧的submap维护方式
主要创新点:
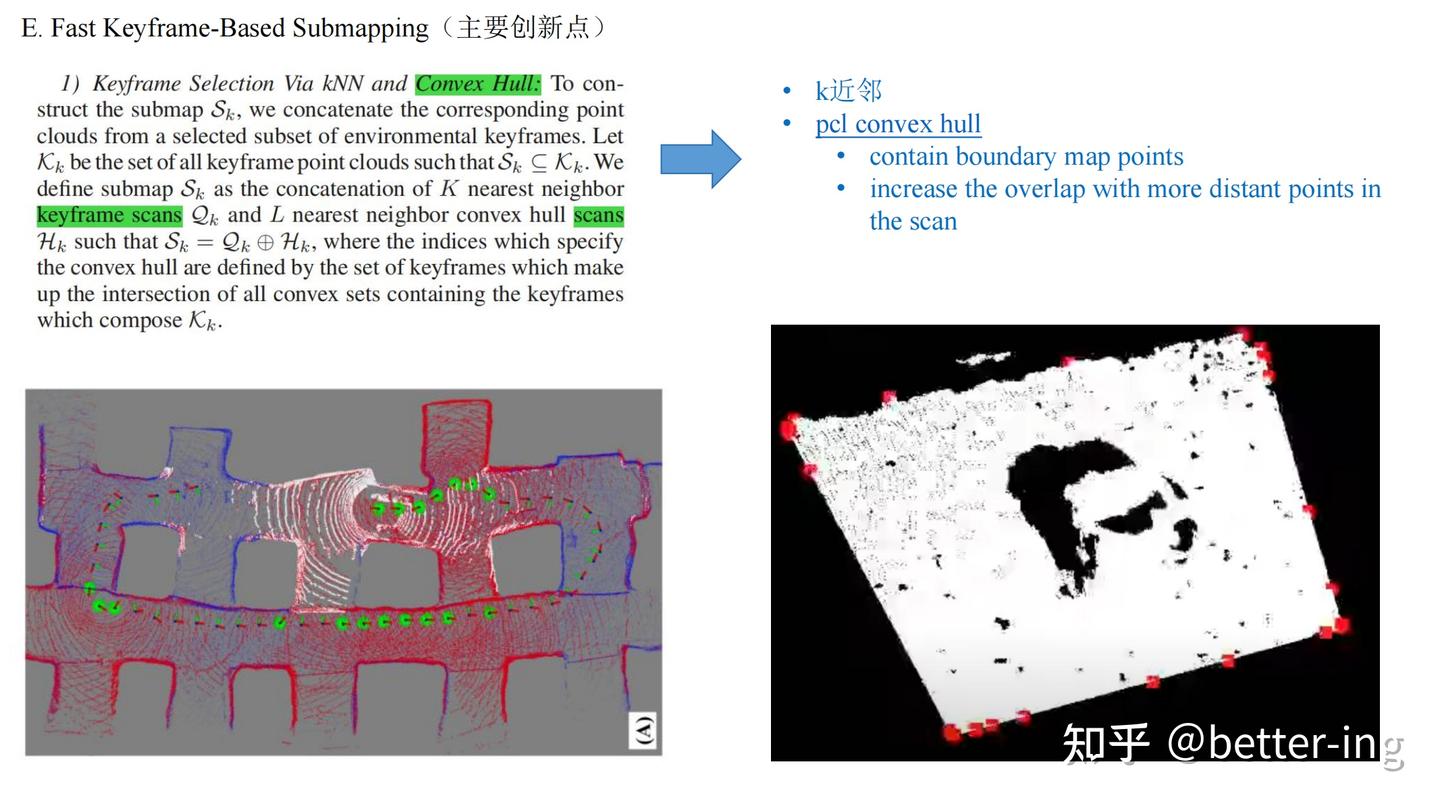
- 基于kNN搜索最近k帧关键帧来组成submap;
- 此外还保留了位姿轨迹凸壳上的点在,再进行kNN搜索k帧纳入到submap中;
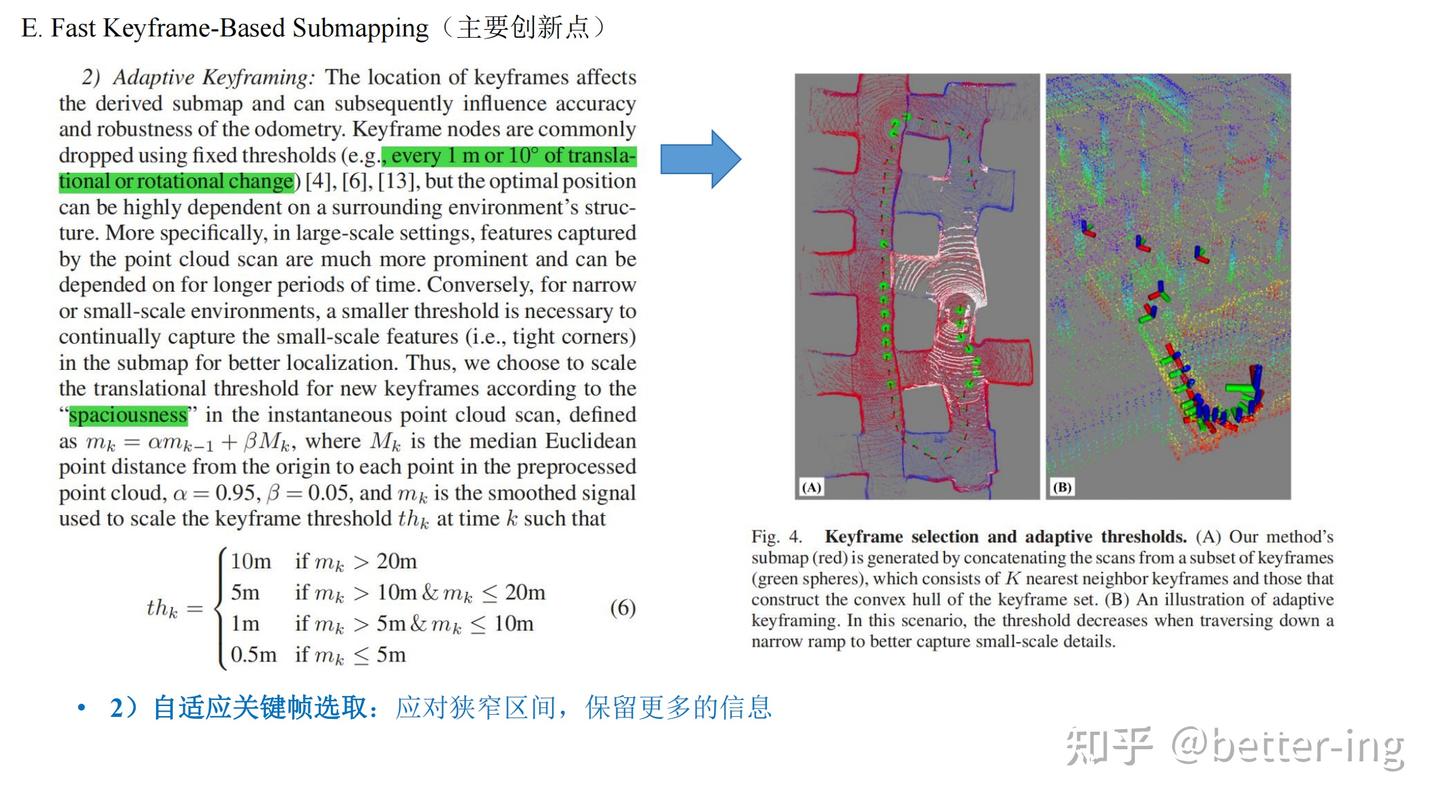
- 关键帧的选取除了考虑平移和角度变化量;还包括自适应调参,根据信息量大小,比如狭窄的地方会适当减少前面两个参数的阈值。
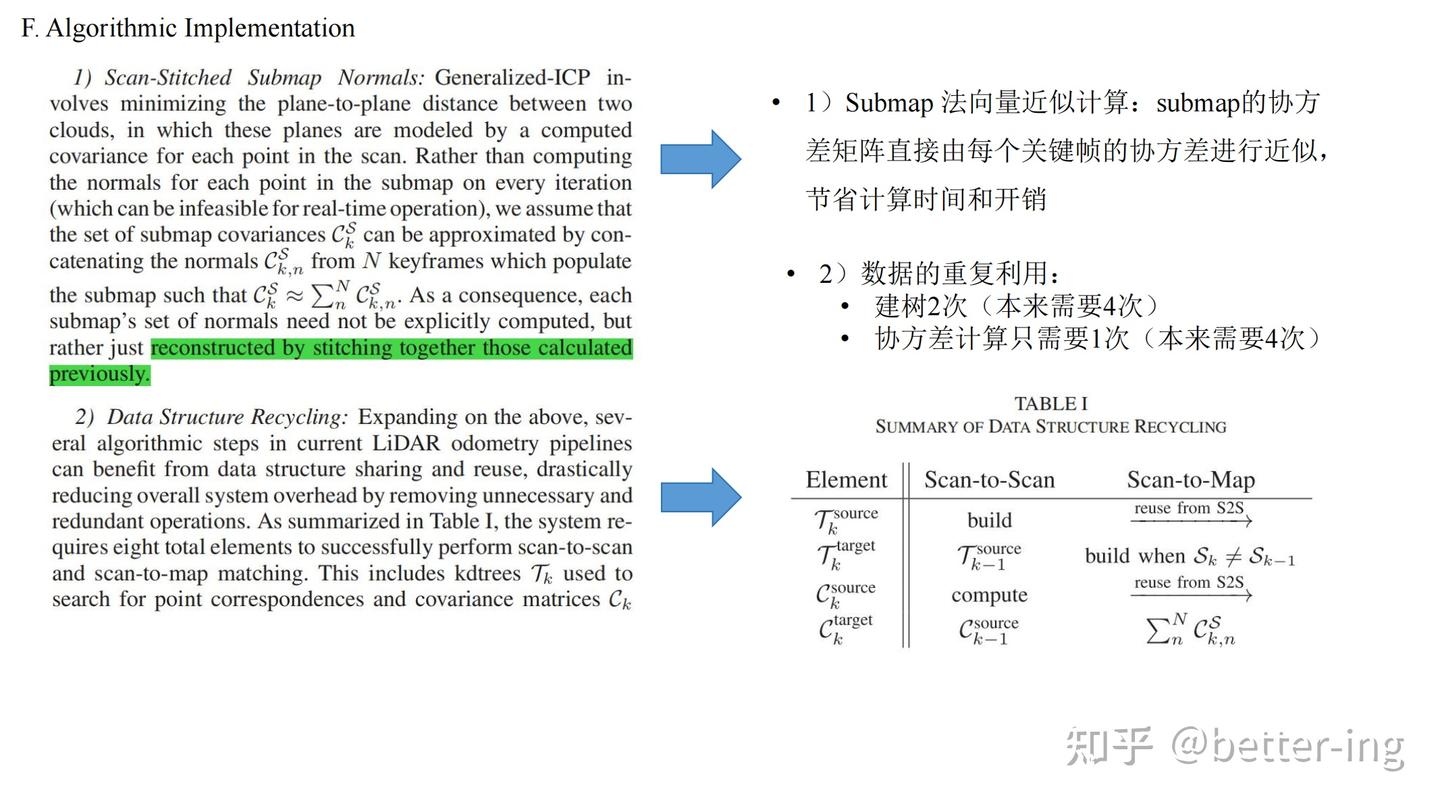
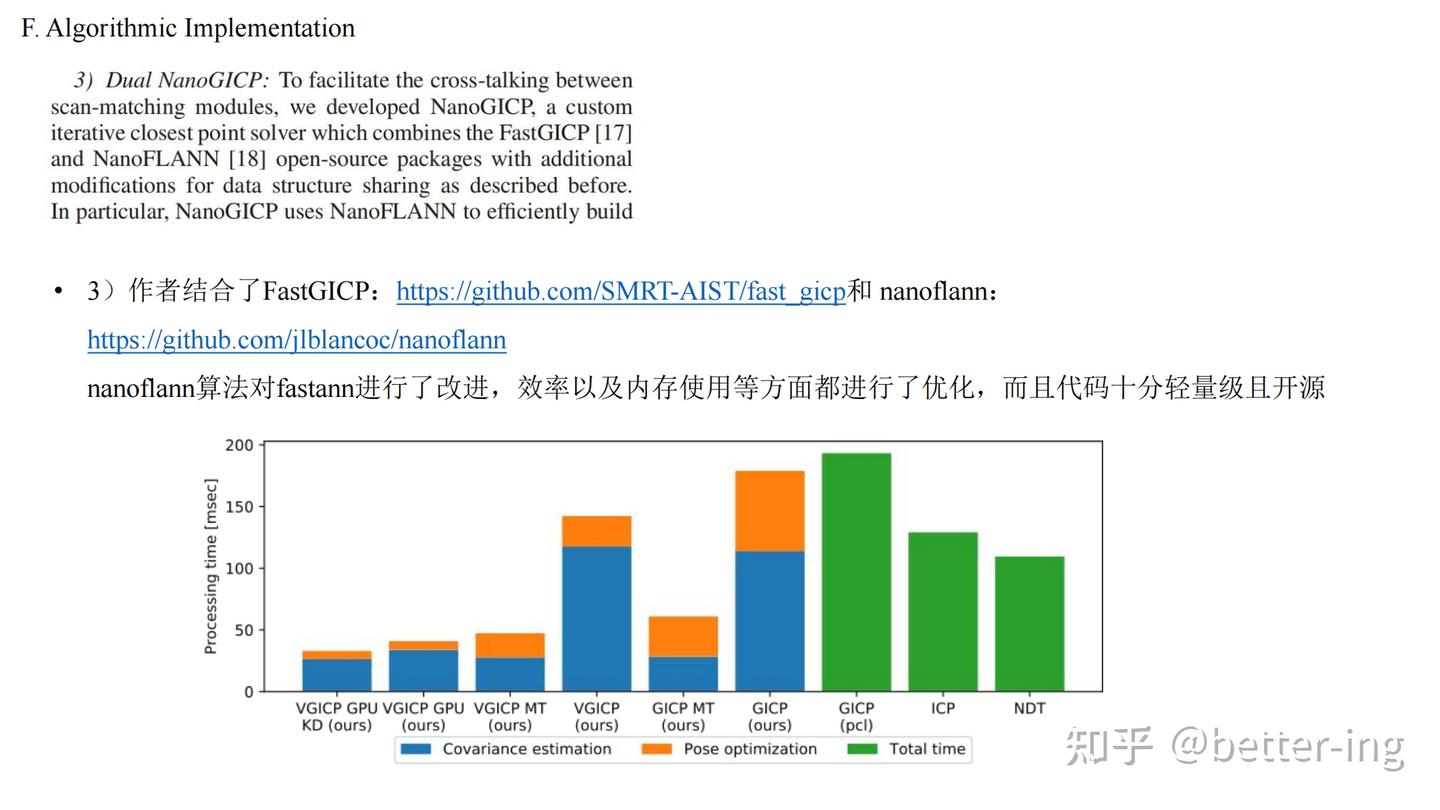
算法加速
- 减少submap协方差的计算,直接从关键帧中累积过来;
- 减少构建kdtree的次数,进行swap,submap发生变化时才会重新构建kdtree。
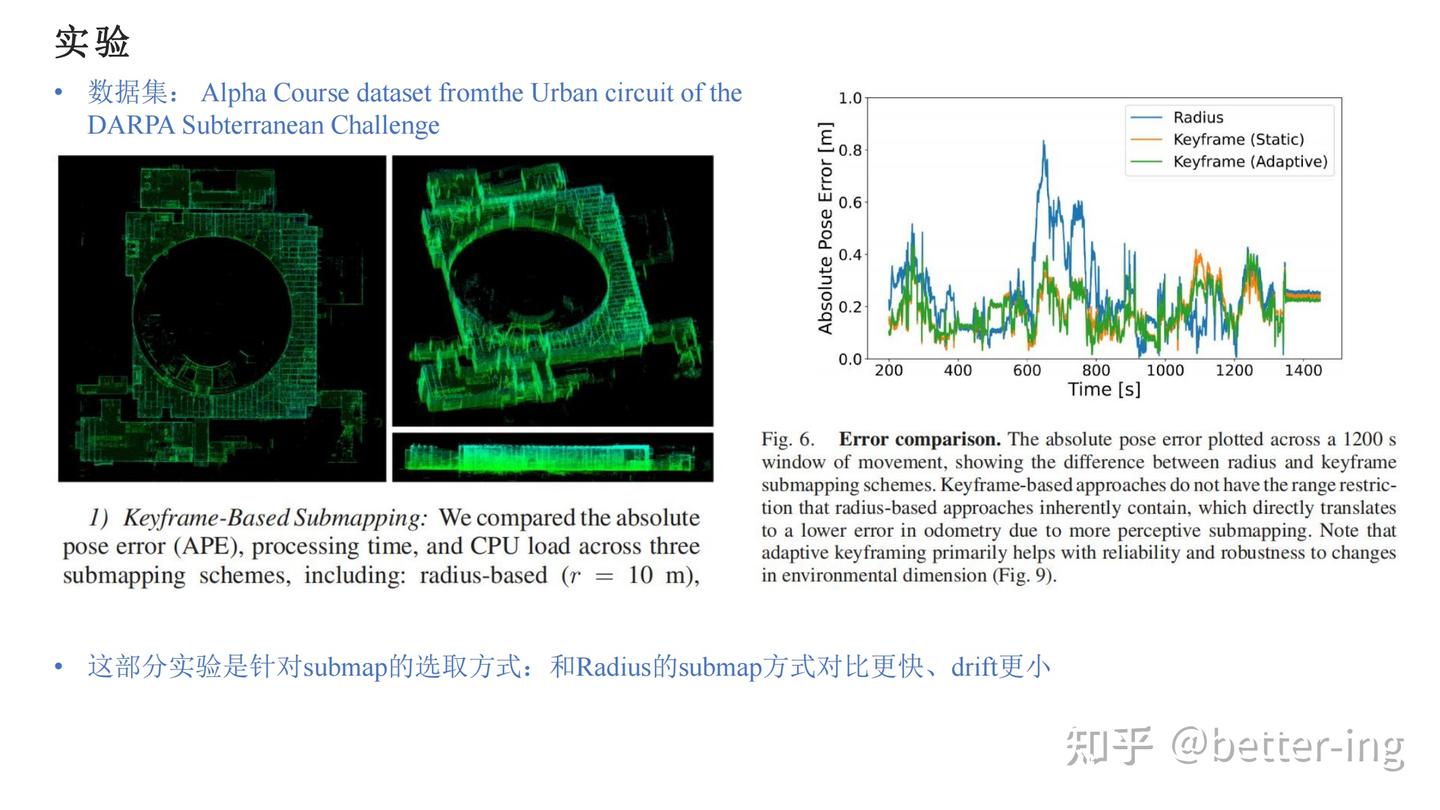
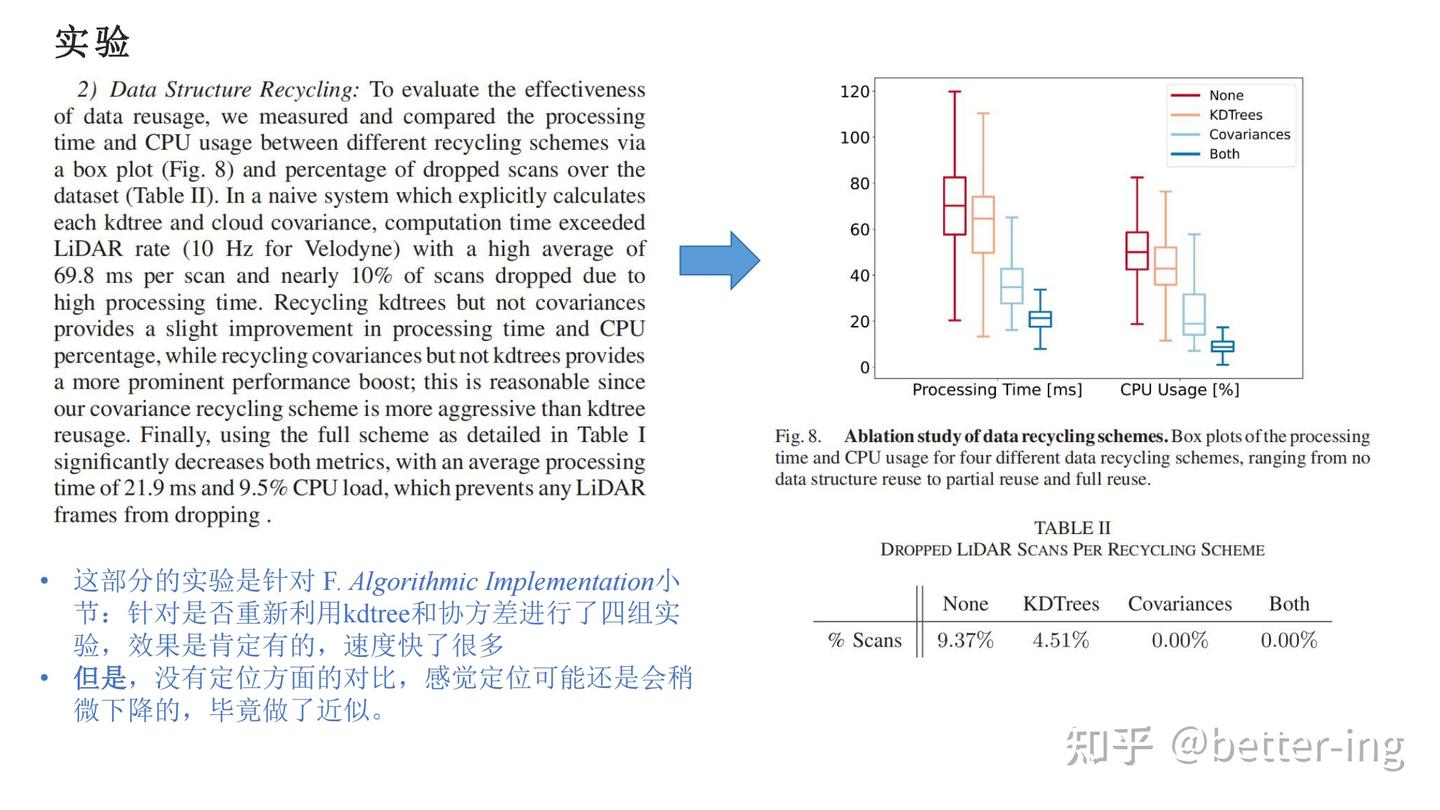
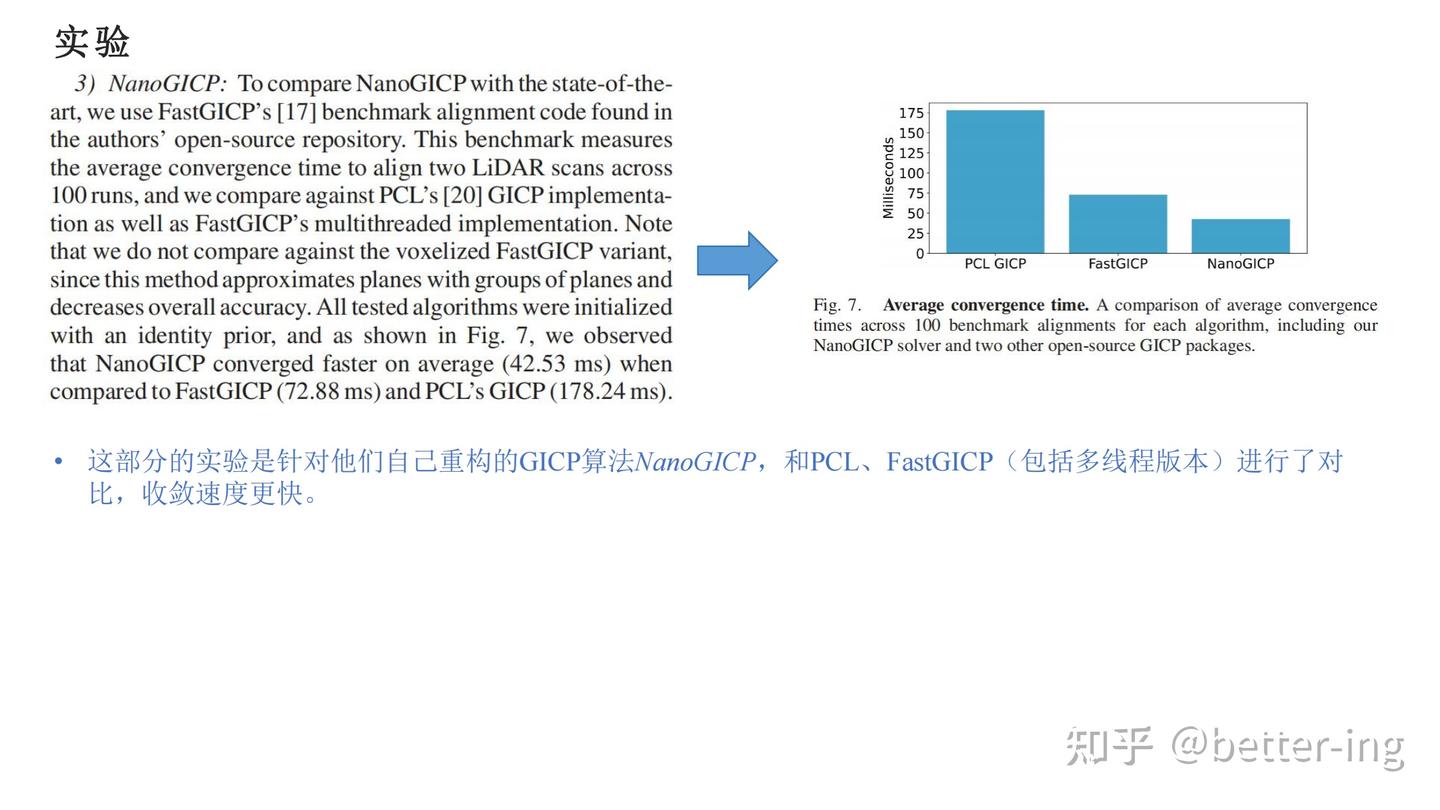
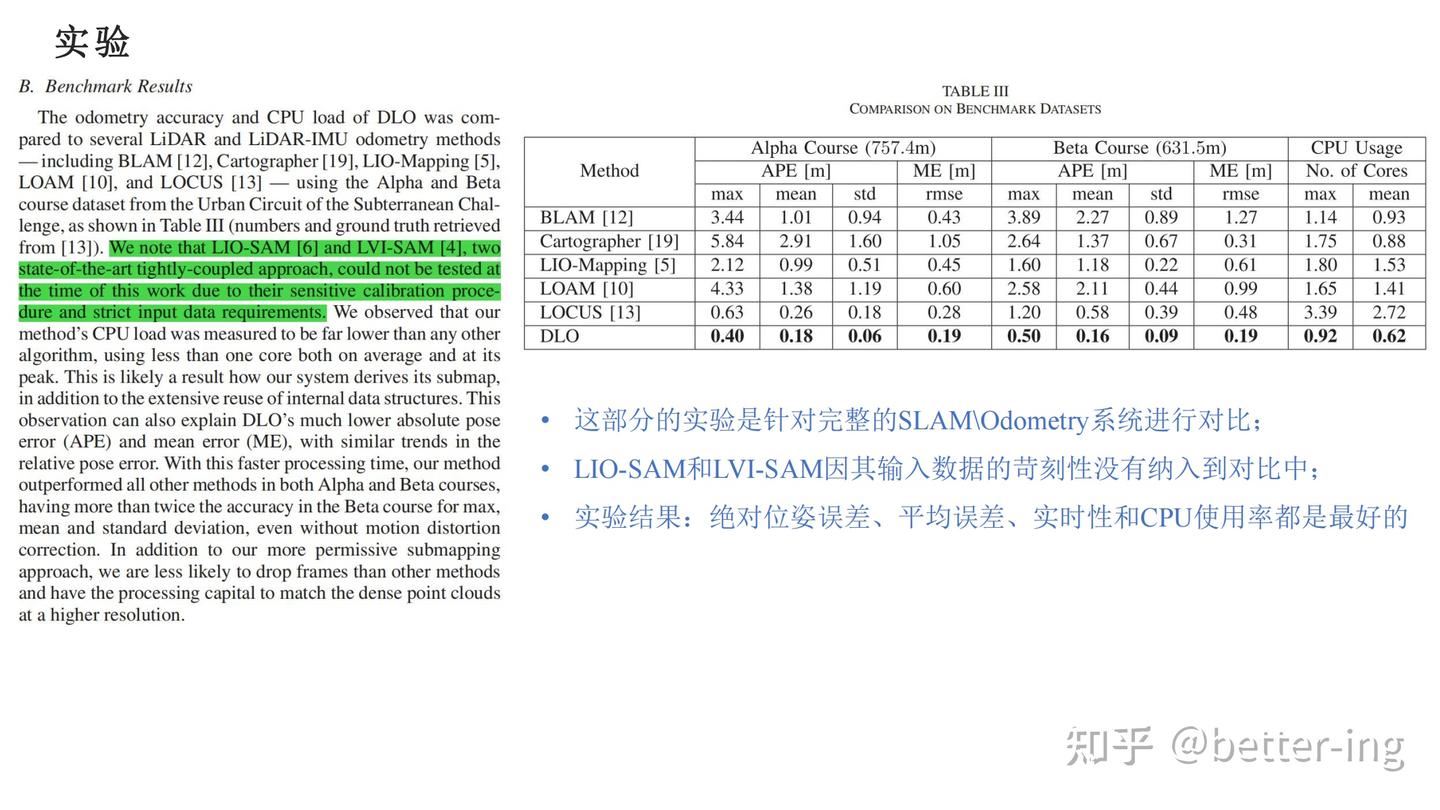
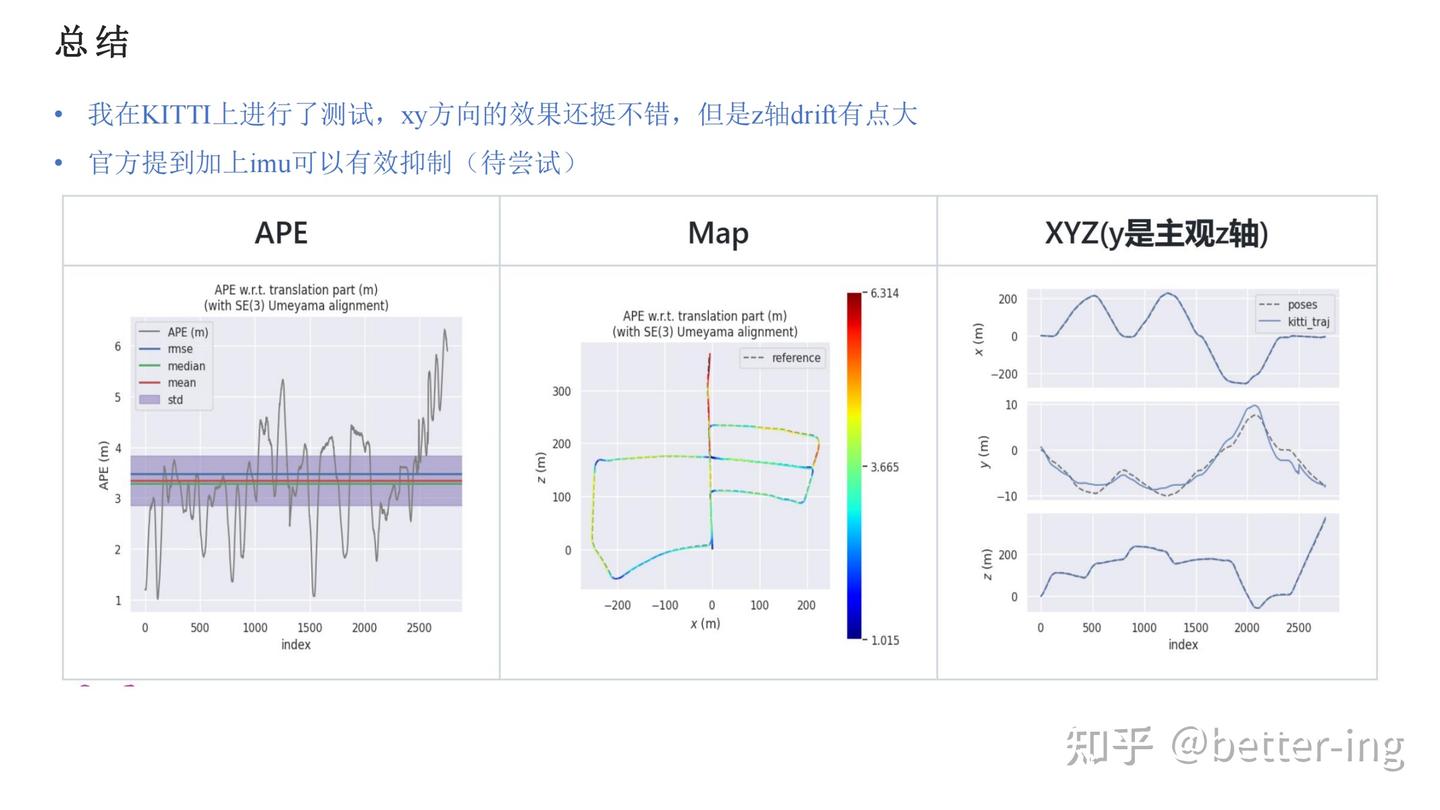
实验验证
评论已关闭