李群和李代数的核心思想
李群和李代数的核心思想
可以理解为专门用于矩阵旋转的东西,符合
封结幺逆法则;李群可以理解为
旋转矩阵,李代数可以理解为旋转向量;李群是连续群,李代数可以表出李群的导数,所以李代数表示的是李群的局部性质;
进而我们可以理解为:旋转向量表达了旋转矩阵的局部(旋转发生那一瞬间的领域内)性质;
由拉格朗日中值定理可知:导数控制函数。李代数控制李群,控制;【1】
也就是说想要估计出函数值,我们可以研究该函数的导数,用来描述某个点领域内性质。故而我们需要建立对李群的求导模型,通过分析导数的性质来估计出相机在这一时刻(领域内)的位姿。
但是我们知道
群是指只有一个运算的集合(我们选择矩阵乘法),所以李群不对加法封闭【2】,但是我们知道李代数是建立在向量空间上的,支持加法运算。所以我们需要一种让李群映射到李代数的机制,然后通过对李代数求导,求出李群的导数。不过,对李代数求导后的结果非常复杂,所以我们需要寻找另外一种求导方式【3】,这就是我们接下来所要介绍的内容。【注】
【1】:某个名牌大学考研的复试题——你知道导数的作用是什么吗?
【2】:李群也是一种群。甭跟我扯什么鳄鱼不是鱼、日本人不是人。
【3】:对谁求导不重要,因为我们总可以通过这个导数控制相同的函数。
李群的两种求导模型(都是映射到了李代数空间)
BCH公式线性化(将李群的变化与李代数的变化联系起来);
对李代数求导的
求导模型;(复杂)- 需要求出左右雅可比矩阵的逆;
对微扰动求导的
扰动模型;(精简)- 不需要求出左右雅可比矩阵的逆;
这两种求导模型都是会有误差存在的
李群和李代数的基础符号
特殊正交群,特殊欧式群;
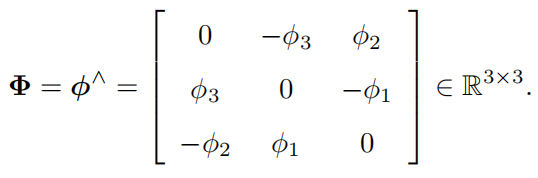
特殊正交群上的李代数,这里我们具象化为三维向量或者反对称阵;
特殊欧式群上的李代数,这里我们具象化为六维向量或者四维方阵;

表示三维空间中的平移,表示三维空间中的旋转。
反对称矩阵与相应的三维向量:和;
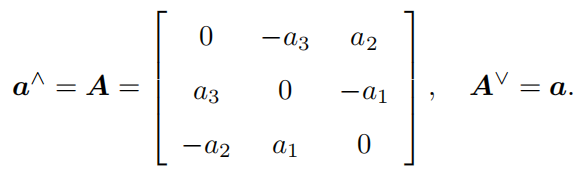
向量和都表示旋转向量的单位方向向量,表示旋转角,表示旋转向量,表示旋转矩阵;
评论已关闭