Fast C++ logging library: spdlog
C++ 日志库:
https://github.com/gabime/spdlog
ROS2 的日志系统也是基于spdlog!
C++ 日志库:
https://github.com/gabime/spdlog
ROS2 的日志系统也是基于spdlog!
arch
lsb_release -a



输出中包含ID 1a86:7523 QinHeng Electronics
CH340 serial converter的信息,这表明CH340设备已经被系统识别。
ls -l /dev/ttyUSB0
/dev下没有该设备节点。
用dmesg
命令查看:
sudo dmesg | grep ch341
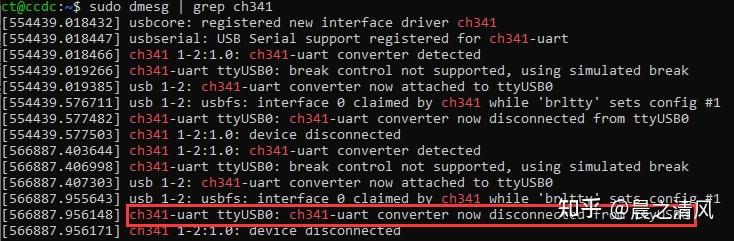
ch341 uart转换器现在与ttyUSB0断开。


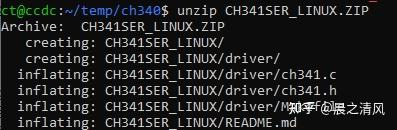


#ch341 linux串行驱动程序
##描述
USB到UART芯片ch340、ch341等的USB串行驱动程序。ch341支持多种工作模式,该驱动程序仅支持其串行端口模式。
事实上,自Linux主线内核版本2.6.24以来,ch341串行驱动程序已经内置。位置是:drivers/usb/serial/ch341.c,很遗憾,内置驱动程序不能保持最新,不能支持芯片的所有功能。我们建议客户使用此驱动程序。
1.打开“终端”
2.切换到“driver”目录
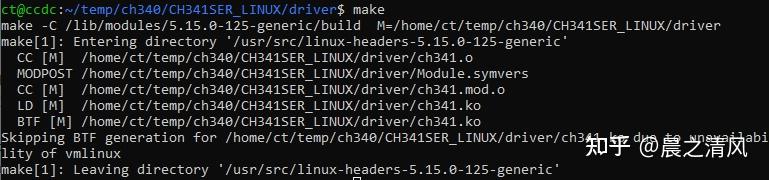
3.使用“make”编译驱动程序,如果成功,将看到模块“ch341.ko
”
4.键入“sudo make load”或“sudo-insmod ch341.ko”以动态加载驱动程序
5.键入“sudo make unload”或“sudo rmmod ch341.ko”卸载驱动程序
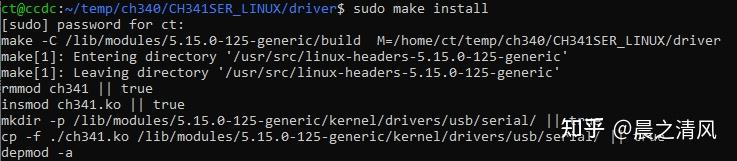
6.键入“sudo make install”使驱动程序永久工作
7.键入“sudo make uninstall”删除驱动程序
8.您可以参考下面的链接来获取uart应用程序,您可以使用gcc或与Cross-gcc交叉编译
https://github.com/WCHSoftGroup/tty_uart

和 brltty
程序冲突。
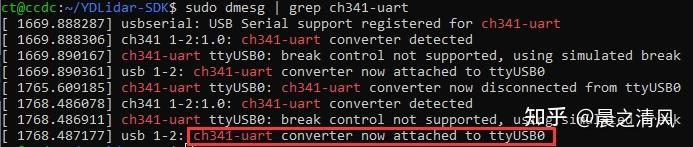
ch341 uart转换器现在连接到ttyUSB0。

sudo chmod 777 /dev/ttyUSB0
CMakeLists.txt 仅有检测到安装了ROS且为ROS1时才编译main_ros_app目录下的应用程序
message(STATUS "ros_version:$ENV{ROS_VERSION}" " ros:$ENV{ROS_DISTRO}")
if( "$ENV{ROS_VERSION}" STREQUAL "1" AND DEFINED ENV{ROS_DISTRO} )
add_subdirectory(${CMAKE_CURRENT_SOURCE_DIR}/main_ros_app/)
message("Infor: found ROS1, ros app will be build!")
else()
message("Warning: Can't found ROS1, so ignore ros app!")
endif()
1、Github
https://github.com/Neutree/COMTool
Cross platform communicate assistant(Serial/network/terminal tool)( 跨平台 串口调试助手 网络调试助手 终端工具 linux windows mac Raspberry Pi )支持插件和二次开发

1、编译debug版本
cmake -DCMAKE_BUILD_TYPE=Debug ../
2、关闭gcc优化选项,增加调试level
set(CMAKE_CXX_FLAGS_DEBUG "-g3 -DDEBUG_MODE" CACHE STRING "C++ compiler flags for Debug builds")
