IMU测量白噪声q(t)与其等效的离散白噪声方差矩阵Qk

1、位置迭代等式不一样?
(1): 《Quaternion kinematics for the error-state Kalman filter》的实现

(2): 从微分方程推导

2、四元数微分方程的求解方法不同?精度区别?
原文链接:http://dev.guyuehome.com/detail?id=1825503213071953921
知识点得逻辑关系如下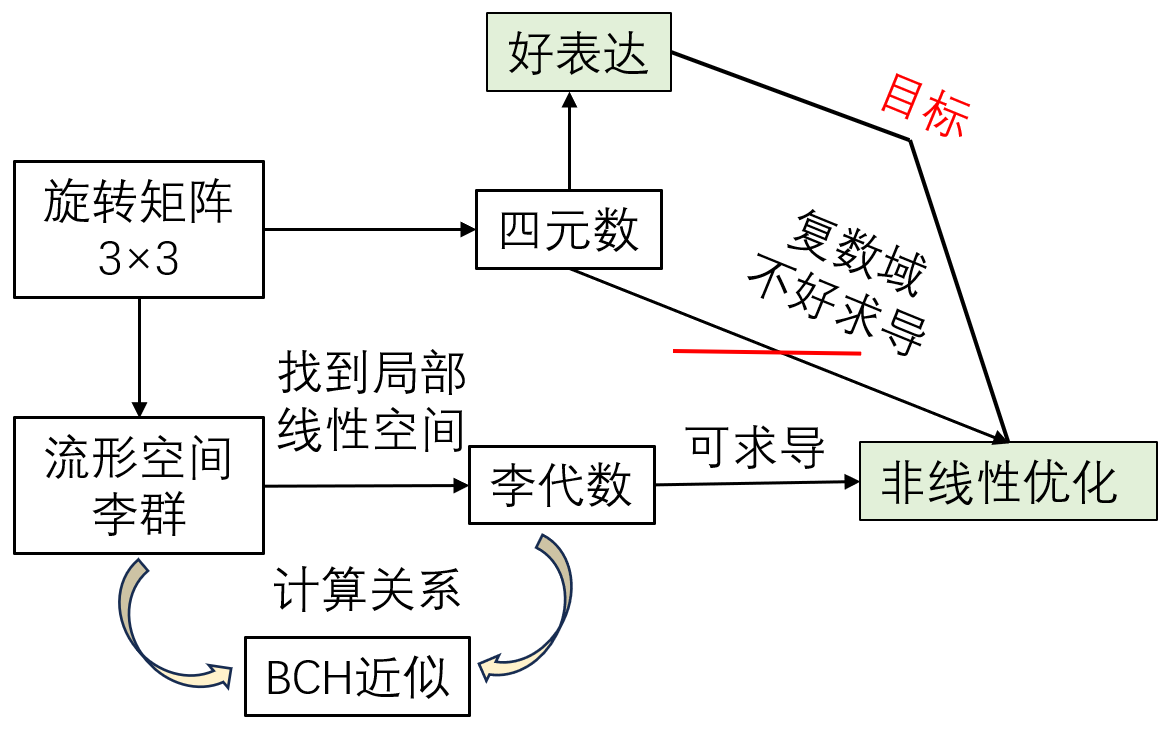
非线性问题由于复杂的数学结构,多样的解空间,局部极值等问题求解难度大大增加。所以在求解时需要把非线性问题转化为更容易处理的形式,例如
SLAM的一个目标是求解位姿,而位姿是由平移和旋转构成,变换矩阵构成如下
旋转矩阵用9个量描述3自由度旋转具有冗余性,欧拉角虽然紧凑但存在奇异性,所以需要寻求一种新的旋转描述方式——四元数,它可以更有效地表示和计算旋转操作,并且相对于欧拉角等其他旋转表示方法,四元数不易受到奇异性的影响。首先需要知道复数可以表达旋转。复数域定义如下,对应了复数的平面坐标系称为复平面,x轴和y轴分别称为实轴和虚轴。当r等于1时称为单位复数。特别的我们拿i乘以一个复数,对应的几何意义是旋转90°。在知道了可以用复数表达旋转后,引入了四元数。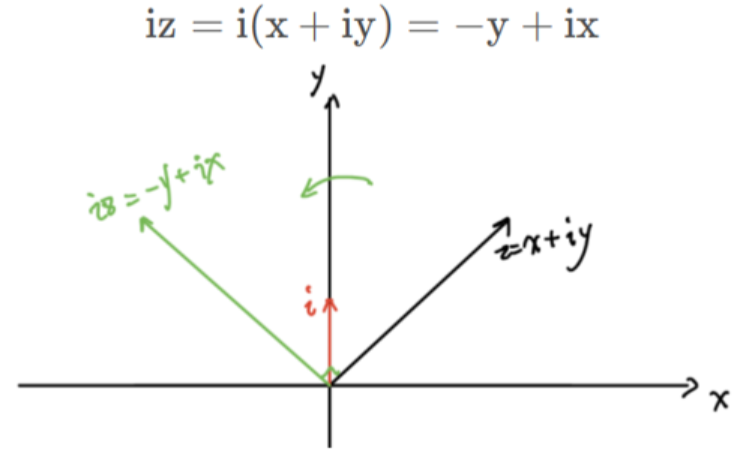 四元数:三维情况下,四元数可作为复数的扩充,具有三个虚部和一个实部。四元数相比于角轴、欧拉角的优势:紧凑、无奇异性。且四元数与角轴之间可以相互转换。
四元数:三维情况下,四元数可作为复数的扩充,具有三个虚部和一个实部。四元数相比于角轴、欧拉角的优势:紧凑、无奇异性。且四元数与角轴之间可以相互转换。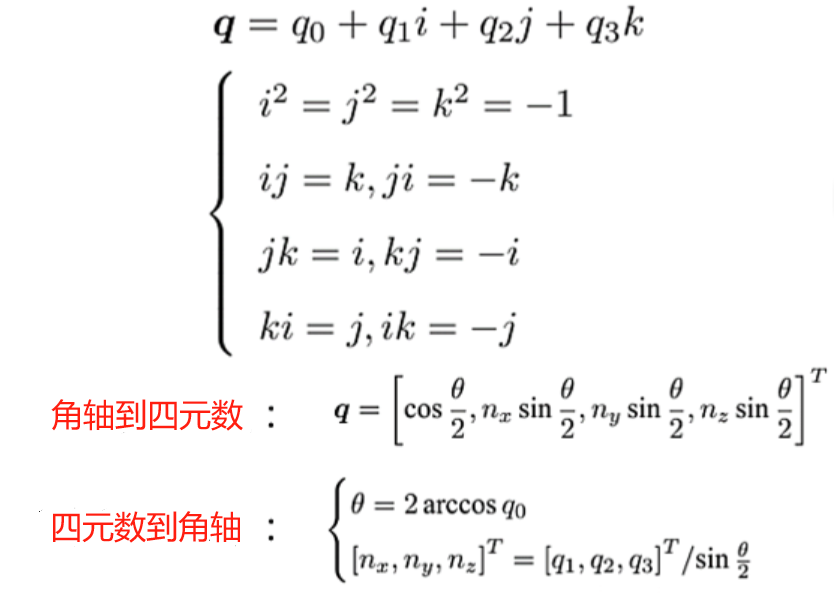 四元数与旋转向量之间的转换
四元数与旋转向量之间的转换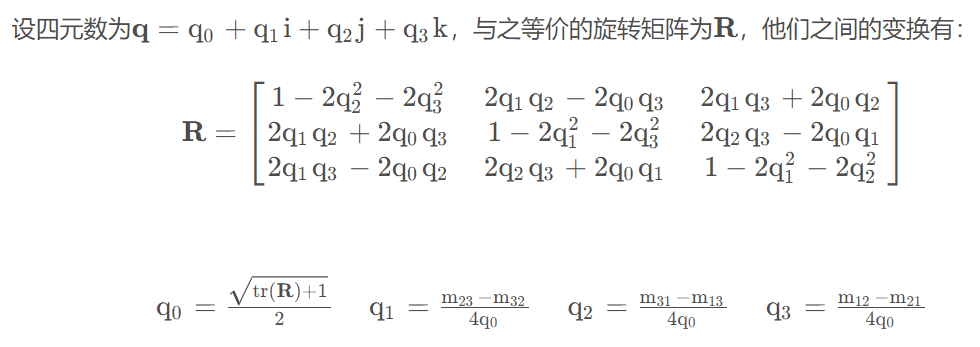 这下可以用四元数来表示旋转了,可以求解计算了吧。
这下可以用四元数来表示旋转了,可以求解计算了吧。
但真实情况好像没那么简单,在SLAM中,要对位姿估计和优化,这避免不了插值、求导、迭代等操作。四元数微分的数学形式比较复杂,涉及到对四元数的实部和虚部的导数进行定义和计算。所以四元数只是表达比较方便,迭代优化还得用旋转矩阵(欧拉角有奇异性)。由旋转矩阵R和平移向量t可以构成如下矩阵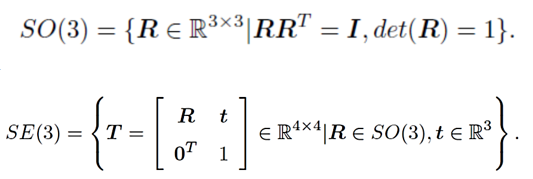 这下子可以优化计算了吧,但还有一点问题。旋转矩阵不满足加法,旋转矩阵必须满足一些特定的性质,包括正交性和行列式等于1。当两个旋转矩阵相加时,它们的和可能不再满足这些性质。不满足相加就意味着不能微分,不能求导等操作,那还怎么优化。我们知道对于线性空间要满足加法和乘法,对于这种只满足其中一种运算的集合叫做群。对于连续性质的群就叫做李群。所以上述的SO(3)和SE(3)都是李群李群是一个群,即它包含了一组元素和一个群运算,通常是乘法或加法。群结构要求群运算满足封闭性、结合律、单位元素和逆元素等性质。
这下子可以优化计算了吧,但还有一点问题。旋转矩阵不满足加法,旋转矩阵必须满足一些特定的性质,包括正交性和行列式等于1。当两个旋转矩阵相加时,它们的和可能不再满足这些性质。不满足相加就意味着不能微分,不能求导等操作,那还怎么优化。我们知道对于线性空间要满足加法和乘法,对于这种只满足其中一种运算的集合叫做群。对于连续性质的群就叫做李群。所以上述的SO(3)和SE(3)都是李群李群是一个群,即它包含了一组元素和一个群运算,通常是乘法或加法。群结构要求群运算满足封闭性、结合律、单位元素和逆元素等性质。
同时李群是流形,在数学中,流形是局部类似于欧几里得空间的空间,但在全局上具有更复杂的拓扑结构的对象。在流形上的每个点,我们可以定义一个与该点相切的线性空间,这个空间就是正切空间。正切空间是局部近似流形的一个线性空间,它包含了所有可能的在该点的切向量。正切空间可以看作是流形在某一点的“平坦”近似。根据流形的定义,我们知道李群可以在局部找到一个线性空间的同胚,且一一对应,同胚是在线性空间中,满足加乘的运算性质,就可以进行迭代优化了,那么现在问题就是如何找到这个一一对应的线性同胚。对于任意旋转矩阵R满足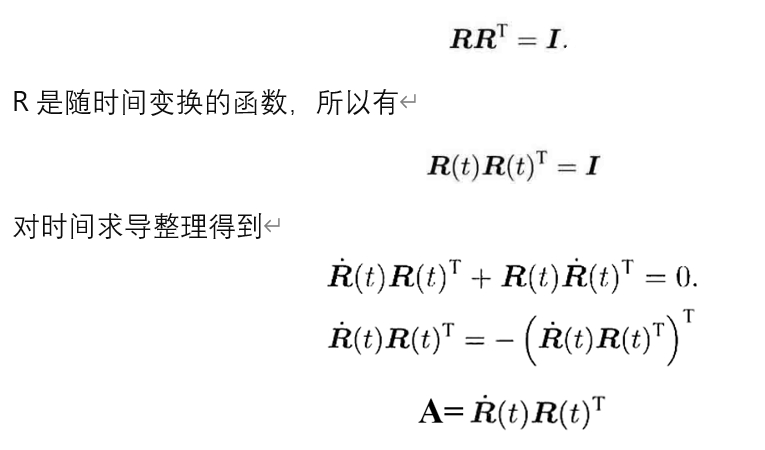 则A是一个反对称矩阵,对于任意的反对称矩阵,存在对应的唯一向量,该向量被称为反对称矩阵的旋转向量或轴向量。所以可以找到一个三维向量与之对应
则A是一个反对称矩阵,对于任意的反对称矩阵,存在对应的唯一向量,该向量被称为反对称矩阵的旋转向量或轴向量。所以可以找到一个三维向量与之对应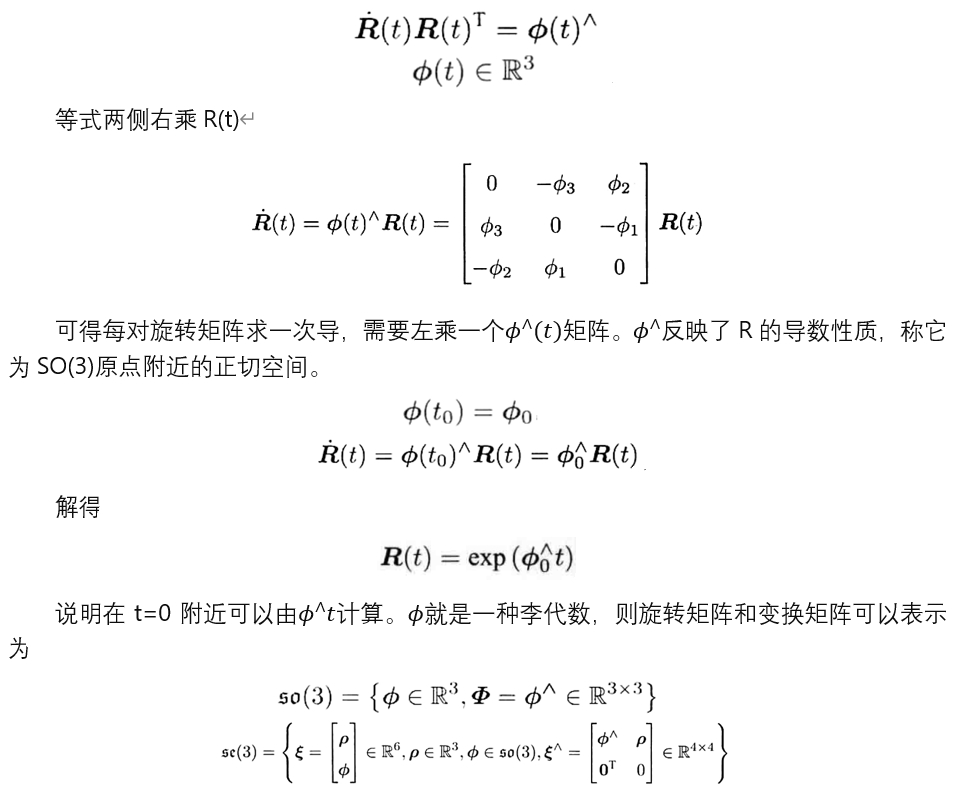
求出李代数后,下一个问题是如何求解矩阵得导数,自然而然想到泰勒展开则虽然泰勒展开可以用来近似非线性函数,但在表示旋转矩阵的乘积时存在一些问题: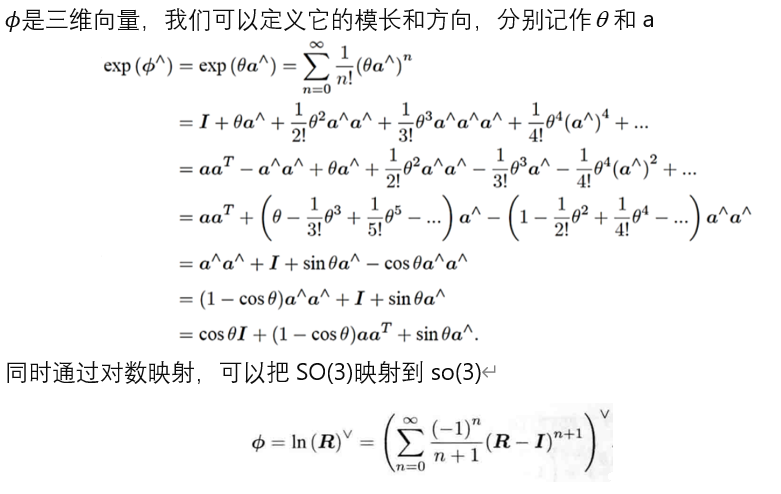 是否对于任意的R都能找到一个唯一的ϕ?很遗憾,指数映射只是一个满射,并不是单射。这意味着每个SO(3)中的元素,都可以找到一个so(3)元素与之对应;但是可能存在多个so(3)中的元素,对应到同一个 SO(3)。但是,如果我们把旋转角度固定在 之间,那么李群和李代数元素是一一对应的。整理李群和李代数得转换关系如下
是否对于任意的R都能找到一个唯一的ϕ?很遗憾,指数映射只是一个满射,并不是单射。这意味着每个SO(3)中的元素,都可以找到一个so(3)元素与之对应;但是可能存在多个so(3)中的元素,对应到同一个 SO(3)。但是,如果我们把旋转角度固定在 之间,那么李群和李代数元素是一一对应的。整理李群和李代数得转换关系如下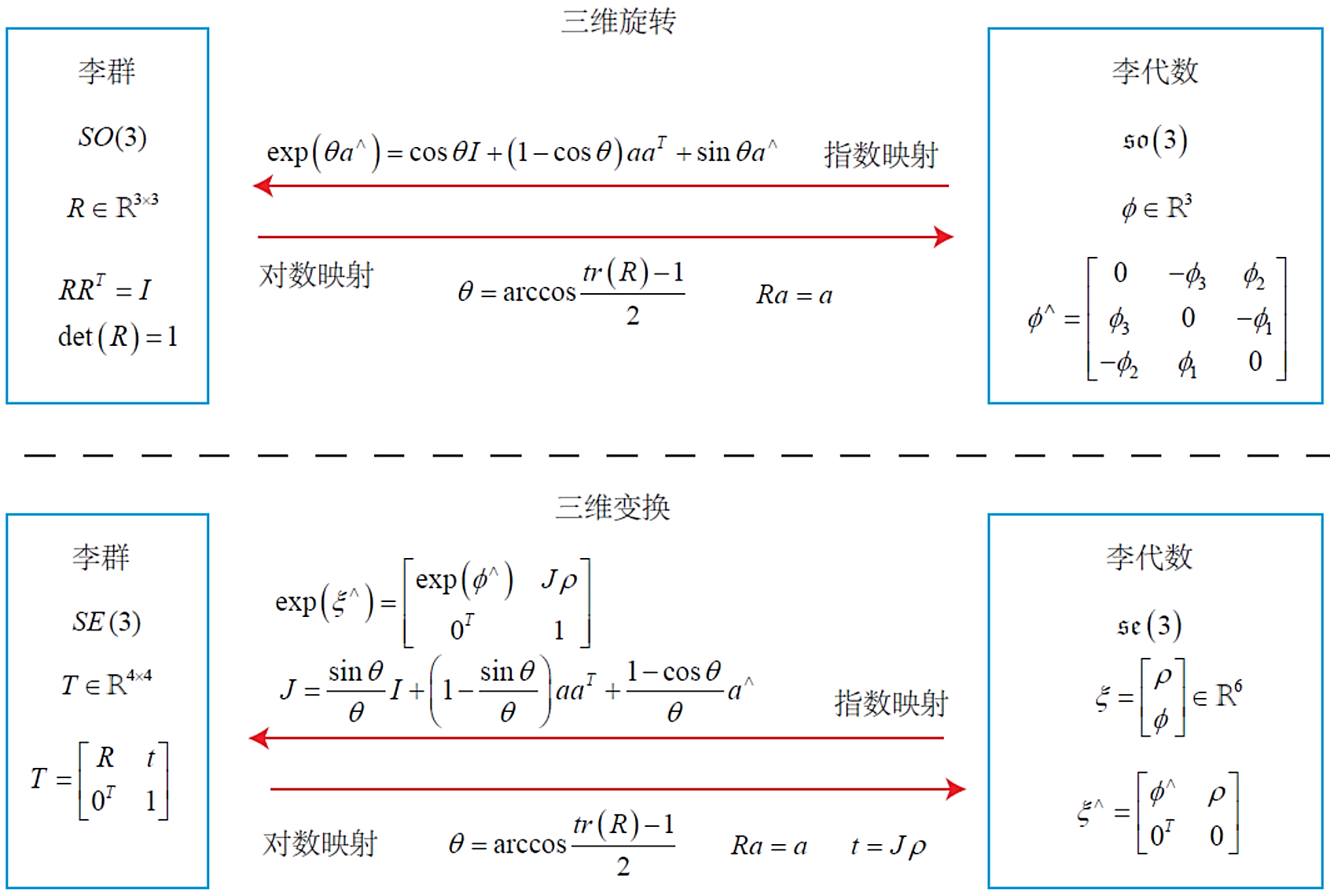
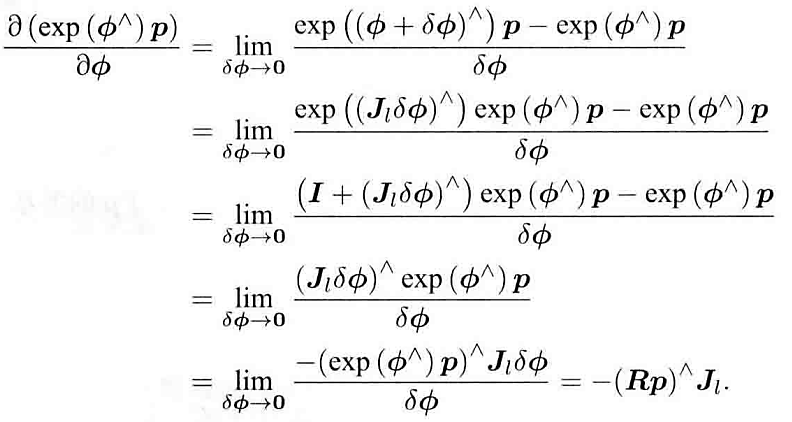 扰动模型:根据李群定义求导
扰动模型:根据李群定义求导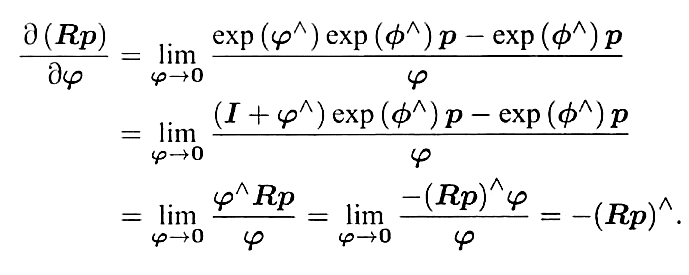 知道怎么求导以及计算对应关系,就能进行迭代优化了。
知道怎么求导以及计算对应关系,就能进行迭代优化了。在众多SLAM系统中,采用四元数接收发布里程计,因其简单明了。在非线性优化过程中,旋转矩阵在流形上,需要找到对应得李代数进行求导,再作用到李群上进行迭代优化。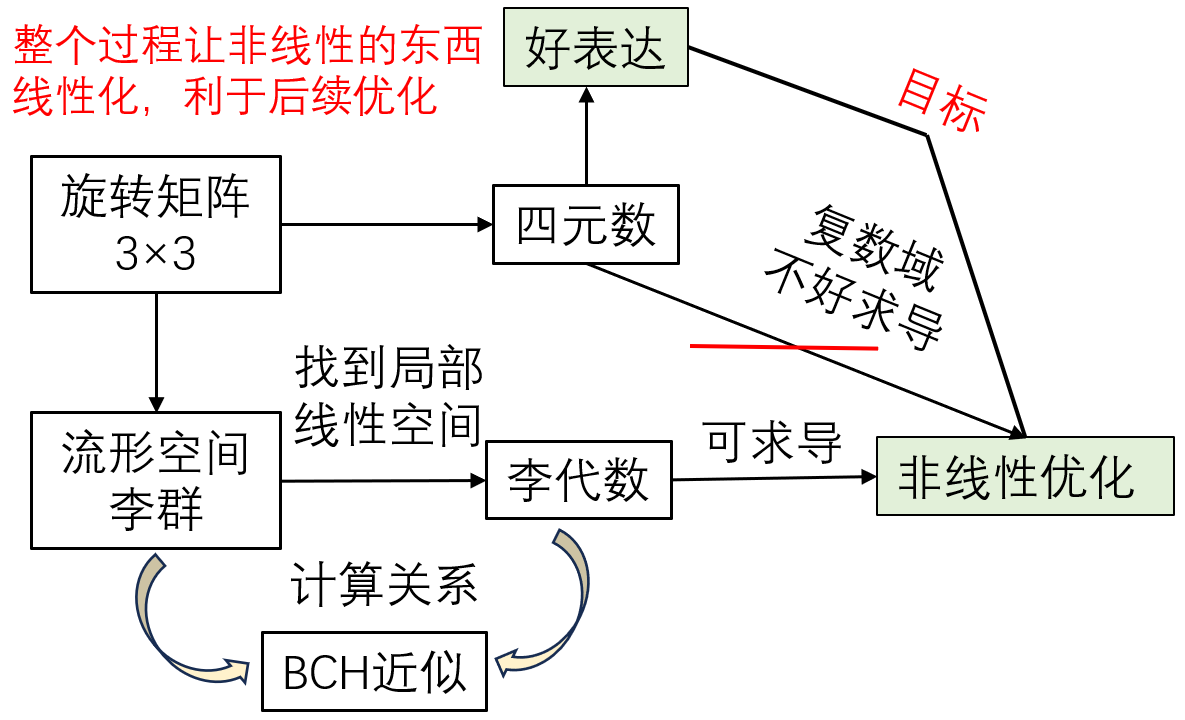
Picard迭代法:又称为毕卡迭代法或逐步逼近法,是一种经典的数值解法。它基于固定点迭代的思想,通过逐步逼近的方式来找到方程的解.
帕德逼近Padé approximant: 是一种对任意函数的有理函数逼近。与泰勒展开近似有同样的作用.

